An error was encountered
Execute the command $./example03. Sh error:
./example03. Sh: 3: syntax error: “(” unexpected
check the document
#!/bin/sh
#function hello
function hello(){
echo "hello SXU."
}
#main
hello
exit 0
Confirm again and again that there is no error.
Find the reason
Related to the actual shell version used
use the command LS - L/bin/* sh to print and view. For example: 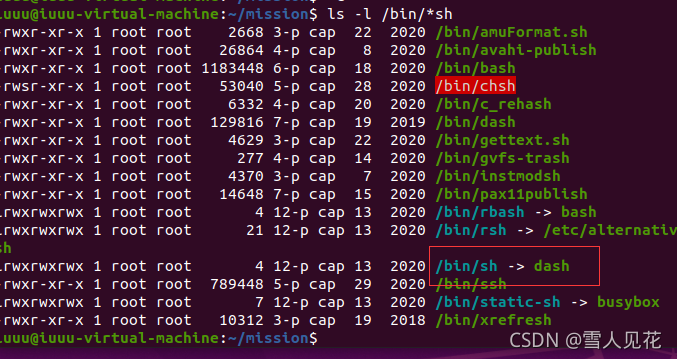
you can see that SH is redirected to dash. Therefore, if./example.sh is executed, dash is used.
Solution:
bash example. Sh the first line of the script #/ Change bin/sh to: #/ Bin/bash, and then execute./example. Sh. The code is correct for standard bash, because Ubuntu/Debian uses dash instead of traditional bash in order to speed up startup. The solution is to cancel Dash: sudo dpkg reconfigure dash , and select no in the selection, choose one of the three methods to succeed.