Errors:
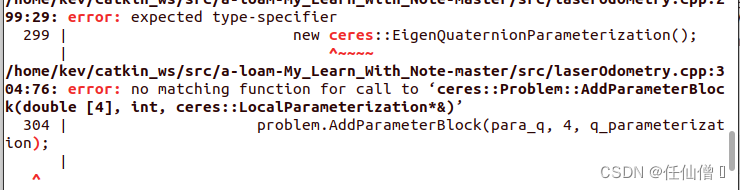
no matching function for call to ‘ceres::Problem::AddParameterBlock’
Error: expected type specification
How to Solve:
The error I reported was ceres-v2.1.0. Just uninstall the current version and reinstall version 1.14.
Errors:
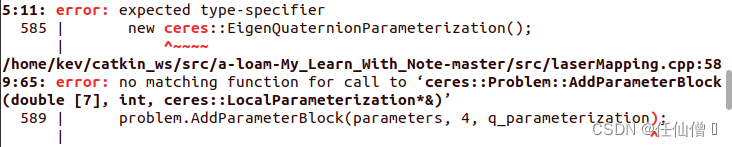
no matching function for call to ‘ceres::Problem::AddParameterBlock’
Error: expected type specification
How to Solve:
The error I reported was ceres-v2.1.0. Just uninstall the current version and reinstall version 1.14.
ROS2 galactic Version Install:
Ubuntu (Debian) — ROS 2 Documentation: Galactic documentation
Installing navigation dependency packages (Installation)
https://navigation.ros.org/getting_started/index.html
sudo apt install ros-<ros2-distro>-navigation2 sudo apt install ros-<ros2-distro>-nav2-bringup
Install the Turtlebot 3 packages:
sudo apt install ros-<ros2-distro>-turtlebot3*
Running the Example, step 3 reports an error
source /opt/ros/<ros2-distro>/setup.bash export TURTLEBOT3_MODEL=waffle export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:/opt/ros/<ros2-distro>/share/turtlebot3_gazebo/models
In the same terminal, run
ros2 launch nav2_bringup tb3_simulation_launch.py headless:=False
Important Log:
[controller_server-8] [INFO] [1661054727.822247083] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
Full Log:
konga@ubuntu:~$ ros2 launch nav2_bringup tb3_simulation_launch.py headless:=False
[INFO] [launch]: All log files can be found below /home/konga/.ros/log/2022-08-21-12-05-20-003298-ubuntu-22365
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [gzserver-1]: process started with pid [22367]
[INFO] [gzclient-2]: process started with pid [22369]
[INFO] [robot_state_publisher-3]: process started with pid [22371]
[INFO] [rviz2-4]: process started with pid [22373]
[INFO] [map_server-5]: process started with pid [22375]
[INFO] [amcl-6]: process started with pid [22377]
[INFO] [lifecycle_manager-7]: process started with pid [22379]
[INFO] [controller_server-8]: process started with pid [22382]
[INFO] [planner_server-9]: process started with pid [22402]
[INFO] [recoveries_server-10]: process started with pid [22411]
[INFO] [bt_navigator-11]: process started with pid [22418]
[INFO] [waypoint_follower-12]: process started with pid [22433]
[INFO] [lifecycle_manager-13]: process started with pid [22441]
[robot_state_publisher-3] [WARN] [1661054720.864507459] [robot_state_publisher]: No robot_description parameter, but command-line argument available. Assuming argument is name of URDF file. This backwards compatibility fallback will be removed in the future.
[robot_state_publisher-3] Link base_link had 7 children
[robot_state_publisher-3] Link camera_link had 2 children
[robot_state_publisher-3] Link camera_depth_frame had 1 children
[robot_state_publisher-3] Link camera_depth_optical_frame had 0 children
[robot_state_publisher-3] Link camera_rgb_frame had 1 children
[robot_state_publisher-3] Link camera_rgb_optical_frame had 0 children
[robot_state_publisher-3] Link caster_back_left_link had 0 children
[robot_state_publisher-3] Link caster_back_right_link had 0 children
[robot_state_publisher-3] Link imu_link had 0 children
[robot_state_publisher-3] Link base_scan had 0 children
[robot_state_publisher-3] Link wheel_left_link had 0 children
[robot_state_publisher-3] Link wheel_right_link had 0 children
[robot_state_publisher-3] [INFO] [1661054720.868551659] [robot_state_publisher]: got segment base_footprint
[robot_state_publisher-3] [INFO] [1661054720.868647680] [robot_state_publisher]: got segment base_link
[robot_state_publisher-3] [INFO] [1661054720.868663701] [robot_state_publisher]: got segment base_scan
[robot_state_publisher-3] [INFO] [1661054720.868675631] [robot_state_publisher]: got segment camera_depth_frame
[robot_state_publisher-3] [INFO] [1661054720.868686801] [robot_state_publisher]: got segment camera_depth_optical_frame
[robot_state_publisher-3] [INFO] [1661054720.868698399] [robot_state_publisher]: got segment camera_link
[robot_state_publisher-3] [INFO] [1661054720.868709890] [robot_state_publisher]: got segment camera_rgb_frame
[robot_state_publisher-3] [INFO] [1661054720.868721500] [robot_state_publisher]: got segment camera_rgb_optical_frame
[robot_state_publisher-3] [INFO] [1661054720.868733165] [robot_state_publisher]: got segment caster_back_left_link
[robot_state_publisher-3] [INFO] [1661054720.868744453] [robot_state_publisher]: got segment caster_back_right_link
[robot_state_publisher-3] [INFO] [1661054720.868755393] [robot_state_publisher]: got segment imu_link
[robot_state_publisher-3] [INFO] [1661054720.868767032] [robot_state_publisher]: got segment wheel_left_link
[robot_state_publisher-3] [INFO] [1661054720.868778277] [robot_state_publisher]: got segment wheel_right_link
[map_server-5] [INFO] [1661054720.879760221] [map_server]:
[map_server-5] map_server lifecycle node launched.
[map_server-5] Waiting on external lifecycle transitions to activate
[map_server-5] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[map_server-5] [INFO] [1661054720.879888046] [map_server]: Creating
[lifecycle_manager-7] [INFO] [1661054720.868669904] [lifecycle_manager_localization]: Creating
[lifecycle_manager-7] [INFO] [1661054720.870975208] [lifecycle_manager_localization]: Creating and initializing lifecycle service clients
[lifecycle_manager-7] [INFO] [1661054720.876692884] [lifecycle_manager_localization]: Starting managed nodes bringup...
[lifecycle_manager-7] [INFO] [1661054720.876751414] [lifecycle_manager_localization]: Configuring map_server
[controller_server-8] [INFO] [1661054720.892359574] [controller_server]:
[controller_server-8] controller_server lifecycle node launched.
[controller_server-8] Waiting on external lifecycle transitions to activate
[controller_server-8] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[waypoint_follower-12] [INFO] [1661054720.914603306] [waypoint_follower]:
[waypoint_follower-12] waypoint_follower lifecycle node launched.
[waypoint_follower-12] Waiting on external lifecycle transitions to activate
[waypoint_follower-12] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[waypoint_follower-12] [INFO] [1661054720.915478865] [waypoint_follower]: Creating
[planner_server-9] [INFO] [1661054720.920024576] [planner_server]:
[planner_server-9] planner_server lifecycle node launched.
[planner_server-9] Waiting on external lifecycle transitions to activate
[planner_server-9] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[planner_server-9] [INFO] [1661054720.922368666] [planner_server]: Creating
[controller_server-8] [INFO] [1661054720.935971283] [controller_server]: Creating controller server
[planner_server-9] [INFO] [1661054720.967401338] [global_costmap.global_costmap]:
[planner_server-9] global_costmap lifecycle node launched.
[planner_server-9] Waiting on external lifecycle transitions to activate
[planner_server-9] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[planner_server-9] [INFO] [1661054720.969067014] [global_costmap.global_costmap]: Creating Costmap
[controller_server-8] [INFO] [1661054720.976103320] [local_costmap.local_costmap]:
[controller_server-8] local_costmap lifecycle node launched.
[controller_server-8] Waiting on external lifecycle transitions to activate
[controller_server-8] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[amcl-6] [INFO] [1661054720.976971743] [amcl]:
[amcl-6] amcl lifecycle node launched.
[amcl-6] Waiting on external lifecycle transitions to activate
[amcl-6] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[amcl-6] [INFO] [1661054720.977346023] [amcl]: Creating
[controller_server-8] [INFO] [1661054720.978236429] [local_costmap.local_costmap]: Creating Costmap
[recoveries_server-10] [INFO] [1661054720.988954148] [recoveries_server]:
[recoveries_server-10] recoveries_server lifecycle node launched.
[recoveries_server-10] Waiting on external lifecycle transitions to activate
[recoveries_server-10] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[lifecycle_manager-13] [INFO] [1661054720.995954504] [lifecycle_manager_navigation]: Creating
[lifecycle_manager-13] [INFO] [1661054721.004679416] [lifecycle_manager_navigation]: Creating and initializing lifecycle service clients
[lifecycle_manager-13] [INFO] [1661054721.013301204] [lifecycle_manager_navigation]: Starting managed nodes bringup...
[lifecycle_manager-13] [INFO] [1661054721.014373901] [lifecycle_manager_navigation]: Configuring controller_server
[controller_server-8] [INFO] [1661054721.015548236] [controller_server]: Configuring controller interface
[controller_server-8] [INFO] [1661054721.016435020] [controller_server]: getting goal checker plugins..
[controller_server-8] [INFO] [1661054721.017726333] [controller_server]: Controller frequency set to 20.0000Hz
[controller_server-8] [INFO] [1661054721.018586559] [local_costmap.local_costmap]: Configuring
[map_server-5] [INFO] [1661054721.023983603] [map_server]: Configuring
[map_server-5] [INFO] [map_io]: Loading yaml file: /opt/ros/galactic/share/nav2_bringup/maps/turtlebot3_world.yaml
[map_server-5] [DEBUG] [map_io]: resolution: 0.05
[map_server-5] [DEBUG] [map_io]: origin[0]: -10
[map_server-5] [DEBUG] [map_io]: origin[1]: -10
[map_server-5] [DEBUG] [map_io]: origin[2]: 0
[map_server-5] [DEBUG] [map_io]: free_thresh: 0.196
[map_server-5] [DEBUG] [map_io]: occupied_thresh: 0.65
[map_server-5] [DEBUG] [map_io]: mode: trinary
[map_server-5] [DEBUG] [map_io]: negate: 0
[map_server-5] [INFO] [map_io]: Loading image_file: /opt/ros/galactic/share/nav2_bringup/maps/turtlebot3_world.pgm
[controller_server-8] [INFO] [1661054721.024988310] [local_costmap.local_costmap]: Using plugin "voxel_layer"
[bt_navigator-11] [INFO] [1661054721.025097688] [bt_navigator]:
[bt_navigator-11] bt_navigator lifecycle node launched.
[bt_navigator-11] Waiting on external lifecycle transitions to activate
[bt_navigator-11] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[bt_navigator-11] [INFO] [1661054721.025219035] [bt_navigator]: Creating
[controller_server-8] [INFO] [1661054721.032150551] [local_costmap.local_costmap]: Subscribed to Topics: scan
[controller_server-8] [INFO] [1661054721.045146498] [local_costmap.local_costmap]: Initialized plugin "voxel_layer"
[controller_server-8] [INFO] [1661054721.045194479] [local_costmap.local_costmap]: Using plugin "inflation_layer"
[controller_server-8] [INFO] [1661054721.047109637] [local_costmap.local_costmap]: Initialized plugin "inflation_layer"
[controller_server-8] [INFO] [1661054721.055104931] [controller_server]: Created progress_checker : progress_checker of type nav2_controller::SimpleProgressChecker
[controller_server-8] [INFO] [1661054721.062998272] [controller_server]: Created goal checker : general_goal_checker of type nav2_controller::SimpleGoalChecker
[map_server-5] [DEBUG] [map_io]: Read map /opt/ros/galactic/share/nav2_bringup/maps/turtlebot3_world.pgm: 384 X 384 map @ 0.05 m/cell
[controller_server-8] [INFO] [1661054721.073954668] [controller_server]: Controller Server has general_goal_checker goal checkers available.
[lifecycle_manager-7] [INFO] [1661054721.075886239] [lifecycle_manager_localization]: Configuring amcl
[amcl-6] [INFO] [1661054721.076157729] [amcl]: Configuring
[amcl-6] [INFO] [1661054721.076279317] [amcl]: initTransforms
[controller_server-8] [INFO] [1661054721.077383454] [controller_server]: Created controller : FollowPath of type dwb_core::DWBLocalPlanner
[controller_server-8] [INFO] [1661054721.080328048] [controller_server]: Setting transform_tolerance to 0.200000
[amcl-6] [INFO] [1661054721.091598625] [amcl]: initPubSub
[amcl-6] [INFO] [1661054721.096152765] [amcl]: Subscribed to map topic.
[lifecycle_manager-7] [INFO] [1661054721.099391920] [lifecycle_manager_localization]: Activating map_server
[map_server-5] [INFO] [1661054721.099721156] [map_server]: Activating
[map_server-5] [INFO] [1661054721.100446634] [map_server]: Creating bond (map_server) to lifecycle manager.
[amcl-6] [INFO] [1661054721.101021846] [amcl]: Received a 384 X 384 map @ 0.050 m/pix
[controller_server-8] [INFO] [1661054721.119541330] [controller_server]: Using critic "RotateToGoal" (dwb_critics::RotateToGoalCritic)
[controller_server-8] [INFO] [1661054721.120883748] [controller_server]: Critic plugin initialized
[controller_server-8] [INFO] [1661054721.121345685] [controller_server]: Using critic "Oscillation" (dwb_critics::OscillationCritic)
[controller_server-8] [INFO] [1661054721.123611118] [controller_server]: Critic plugin initialized
[controller_server-8] [INFO] [1661054721.124017486] [controller_server]: Using critic "BaseObstacle" (dwb_critics::BaseObstacleCritic)
[controller_server-8] [INFO] [1661054721.126015719] [controller_server]: Critic plugin initialized
[controller_server-8] [INFO] [1661054721.126783217] [controller_server]: Using critic "GoalAlign" (dwb_critics::GoalAlignCritic)
[controller_server-8] [INFO] [1661054721.128207439] [controller_server]: Critic plugin initialized
[controller_server-8] [INFO] [1661054721.132757063] [controller_server]: Using critic "PathAlign" (dwb_critics::PathAlignCritic)
[controller_server-8] [INFO] [1661054721.134499382] [controller_server]: Critic plugin initialized
[controller_server-8] [INFO] [1661054721.135182604] [controller_server]: Using critic "PathDist" (dwb_critics::PathDistCritic)
[controller_server-8] [INFO] [1661054721.136518980] [controller_server]: Critic plugin initialized
[controller_server-8] [INFO] [1661054721.137614779] [controller_server]: Using critic "GoalDist" (dwb_critics::GoalDistCritic)
[controller_server-8] [INFO] [1661054721.138719753] [controller_server]: Critic plugin initialized
[controller_server-8] [INFO] [1661054721.138767755] [controller_server]: Controller Server has FollowPath controllers available.
[lifecycle_manager-13] [INFO] [1661054721.145224684] [lifecycle_manager_navigation]: Configuring planner_server
[planner_server-9] [INFO] [1661054721.145496085] [planner_server]: Configuring
[planner_server-9] [INFO] [1661054721.145538827] [global_costmap.global_costmap]: Configuring
[planner_server-9] [INFO] [1661054721.149872435] [global_costmap.global_costmap]: Using plugin "static_layer"
[planner_server-9] [INFO] [1661054721.155595142] [global_costmap.global_costmap]: Subscribing to the map topic (/map) with transient local durability
[planner_server-9] [INFO] [1661054721.156732262] [global_costmap.global_costmap]: Initialized plugin "static_layer"
[planner_server-9] [INFO] [1661054721.156787605] [global_costmap.global_costmap]: Using plugin "obstacle_layer"
[planner_server-9] [INFO] [1661054721.159489903] [global_costmap.global_costmap]: Subscribed to Topics: scan
[planner_server-9] [INFO] [1661054721.167073707] [global_costmap.global_costmap]: Initialized plugin "obstacle_layer"
[planner_server-9] [INFO] [1661054721.167122072] [global_costmap.global_costmap]: Using plugin "inflation_layer"
[planner_server-9] [INFO] [1661054721.169217818] [global_costmap.global_costmap]: StaticLayer: Resizing costmap to 384 X 384 at 0.050000 m/pix
[planner_server-9] [INFO] [1661054721.172473382] [global_costmap.global_costmap]: Initialized plugin "inflation_layer"
[planner_server-9] [INFO] [1661054721.183877678] [planner_server]: Created global planner plugin GridBased of type nav2_navfn_planner/NavfnPlanner
[planner_server-9] [INFO] [1661054721.183936392] [planner_server]: Configuring plugin GridBased of type NavfnPlanner
[planner_server-9] [INFO] [1661054721.192503691] [planner_server]: Planner Server has GridBased planners available.
[lifecycle_manager-13] [INFO] [1661054721.200792028] [lifecycle_manager_navigation]: Configuring recoveries_server
[recoveries_server-10] [INFO] [1661054721.201137276] [recoveries_server]: Configuring
[lifecycle_manager-7] [INFO] [1661054721.205102928] [lifecycle_manager_localization]: Server map_server connected with bond.
[lifecycle_manager-7] [INFO] [1661054721.205160447] [lifecycle_manager_localization]: Activating amcl
[amcl-6] [INFO] [1661054721.205830108] [amcl]: Activating
[amcl-6] [INFO] [1661054721.205882135] [amcl]: Creating bond (amcl) to lifecycle manager.
[recoveries_server-10] [INFO] [1661054721.207969391] [recoveries_server]: Creating recovery plugin spin of type nav2_recoveries/Spin
[recoveries_server-10] [INFO] [1661054721.209492908] [recoveries_server]: Configuring spin
[recoveries_server-10] [INFO] [1661054721.214529117] [recoveries_server]: Creating recovery plugin backup of type nav2_recoveries/BackUp
[recoveries_server-10] [INFO] [1661054721.216551826] [recoveries_server]: Configuring backup
[recoveries_server-10] [INFO] [1661054721.224020090] [recoveries_server]: Creating recovery plugin wait of type nav2_recoveries/Wait
[recoveries_server-10] [INFO] [1661054721.225462622] [recoveries_server]: Configuring wait
[lifecycle_manager-13] [INFO] [1661054721.244608250] [lifecycle_manager_navigation]: Configuring bt_navigator
[bt_navigator-11] [INFO] [1661054721.244853696] [bt_navigator]: Configuring
[lifecycle_manager-7] [INFO] [1661054721.308835764] [lifecycle_manager_localization]: Server amcl connected with bond.
[lifecycle_manager-7] [INFO] [1661054721.308954750] [lifecycle_manager_localization]: Managed nodes are active
[lifecycle_manager-7] [INFO] [1661054721.308976164] [lifecycle_manager_localization]: Creating bond timer...
[lifecycle_manager-13] [INFO] [1661054721.311554467] [lifecycle_manager_navigation]: Configuring waypoint_follower
[waypoint_follower-12] [INFO] [1661054721.311858329] [waypoint_follower]: Configuring
[waypoint_follower-12] [INFO] [1661054721.319677799] [waypoint_follower]: Created waypoint_task_executor : wait_at_waypoint of type nav2_waypoint_follower::WaitAtWaypoint
[lifecycle_manager-13] [INFO] [1661054721.321763105] [lifecycle_manager_navigation]: Activating controller_server
[controller_server-8] [INFO] [1661054721.321982128] [controller_server]: Activating
[controller_server-8] [INFO] [1661054721.322014092] [local_costmap.local_costmap]: Activating
[controller_server-8] [INFO] [1661054721.322036107] [local_costmap.local_costmap]: Checking transform
[controller_server-8] [INFO] [1661054721.322074057] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[rviz2-4] [INFO] [1661054721.479822887] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-4] [INFO] [1661054721.479918995] [rviz2]: OpenGl version: 4.6 (GLSL 4.6)
[rviz2-4] [INFO] [1661054721.518112093] [rviz2]: Stereo is NOT SUPPORTED
[amcl-6] [WARN] [1661054721.686275463] [amcl]: New subscription discovered on topic '/particle_cloud', requesting incompatible QoS. No messages will be sent to it. Last incompatible policy: RELIABILITY_QOS_POLICY
[rviz2-4] [INFO] [1661054721.813885816] [rviz2]: Trying to create a map of size 384 x 384 using 1 swatches
[controller_server-8] [INFO] [1661054721.822138451] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[rviz2-4] [ERROR] [1661054721.827166910] [rviz2]: Vertex Program:rviz/glsl120/indexed_8bit_image.vert Fragment Program:rviz/glsl120/indexed_8bit_image.frag GLSL link result :
[rviz2-4] active samplers with a different type refer to the same texture image unit
[controller_server-8] [INFO] [1661054722.322248884] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[controller_server-8] [INFO] [1661054722.822160507] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[controller_server-8] [INFO] [1661054723.322205491] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[controller_server-8] [INFO] [1661054723.822234683] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[controller_server-8] [INFO] [1661054724.322215965] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[controller_server-8] [INFO] [1661054724.822211246] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[controller_server-8] [INFO] [1661054725.322197725] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[controller_server-8] [INFO] [1661054725.822223261] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[controller_server-8] [INFO] [1661054726.322220660] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[controller_server-8] [INFO] [1661054726.822223380] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[controller_server-8] [INFO] [1661054727.322217193] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[controller_server-8] [INFO] [1661054727.822247083] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
Solution:
Before running, build the Gazebo environment and execute this script:
source /usr/share/gazebo/setup.bashQuestion:
In vscode, when using cmake for configure, I found that the CMakeLists.txt generated by catkin_init_workspace reported an error:
find_package(catkin) failed. catkin was neither found in the workspace···
analysis:
After investigation and analysis, it is found that there is a problem with the following code in CMakeLists.txt:
# use command ‘catkin_init_workspace’ to generate ‘CMakeLists.txt’
set(catkin_search_path "")
foreach(path ${CMAKE_PREFIX_PATH})
if(EXISTS "${path}/.catkin")
list(FIND catkin_search_path ${path} _index)
if(_index EQUAL -1)
list(APPEND catkin_search_path ${path})
endif()
endif()
endforeach()
Specifically, the path from the variable ${CMAKE_PREFIX_PATH} is not searched for .catkin.
By directly modifying the /opt/ros/melodic/share/catkin/cmake/toplevel.cmake print variable ${CMAKE_PREFIX_PATH} pointed to by CMakeLists.txt, the output was found to be empty.
However, the configure in the system terminal works, and the command executed is the same as the configure in vscde, as follows
# The actual command executed when configure with cmake-tool in vscode
/usr/bin/cmake \
--no-warn-unused-cli \
-DCMAKE_PREFIX_PATH=/opt/ros/melodic \
-DCMAKE_EXPORT_COMPILE_COMMANDS:BOOL=TRUE -DCMAKE_BUILD_TYPE:STRING=Release \
-DCMAKE_C_COMPILER:FILEPATH=/usr/bin/x86_64-linux-gnu-gcc-7 \
-DCMAKE_CXX_COMPILER:FILEPATH=/usr/bin/x86_64-linux-gnu-g++-7 \
-S/home/will/allpros/avp_slam_sim \
-B/home/will/allpros/avp_slam_sim/build_vsc \
-G "Unix Makefiles"
Also, even if you add export CMAKE_PREFIX_PATH=/opt/ros/melodic:$CMAKE_PREFIX_PATH to ~/.bashrc, you will still get an error after restarting the computer and doing configure, where the path /opt/ros/melodic was determined when installing ros Of course, you can also use the command find / -iname *.catkin or locate *.catkin to find the specific path.
To summarize.
The reason for this is unclear. It is suspected that the environment variable ${CMAKE_PREFIX_PATH} obtained by vscode during cmake-configure is empty, but when using the system terminal ${CMAKE_PREFIX_PATH} has the value /opt/ros/melodic, which comes from the source /opt/ros/melodic at boot time. source /opt/ros/melodic/setup.bash, which is already written in the ~/.bashrc auto-execution file when we installed ROS, and after booting, echo $CMAKE_PREFIX_PATH in system terminal can output /opt/ros/melodic normally. .
Solution:
1. modify the system file directly
$ sudo gedit /opt/ros/melodic/share/catkin/cmake/toplevel.cmake
Add the following in /opt/ros/melodic/share/catkin/cmake/toplevel.cmake
list(APPEND CMAKE_PREFIX_PATH "/opt/ros/melodic")
The results are as follows:
# toplevel CMakeLists.txt for a catkin workspace
# catkin/cmake/toplevel.cmake
cmake_minimum_required(VERSION 3.0.2)
project(Project)
set(CATKIN_TOPLEVEL TRUE)
list(APPEND CMAKE_PREFIX_PATH "/opt/ros/melodic")
# search for catkin within the workspace
set(_cmd "catkin_find_pkg" "catkin" "${CMAKE_SOURCE_DIR}")
execute_process(COMMAND ${_cmd}
RESULT_VARIABLE _res
OUTPUT_VARIABLE _out
ERROR_VARIABLE _err
OUTPUT_STRIP_TRAILING_WHITESPACE
ERROR_STRIP_TRAILING_WHITESPACE
)
...
...
...
2. add attribute in cmake setting of vscode
Ctrl+Shift+P –> preferences: open settings (JSON)
add:
"cmake.configureArgs": [
"-DCMAKE_PREFIX_PATH=/opt/ros/melodic"
],catkin_make Compile Error:
– Found OpenCV: /opt/ros/kinetic (found version “3.3.1”) CMake Error at cmake/FindGlog.cmake:77 (MESSAGE): Failed to find glog - Could not find glog include directory, set GLOG_INCLUDE_DIR to directory containing glog/logging.h Call Stack (most recent call first): cmake/FindGlog.cmake:103 (GLOG_REPORT_NOT_FOUND) CMakeLists.txt:147 (find_package)
Solution:
$ sudo apt-get install libgoogle-glog-dev
[rospack] Error: no such package beginner_tutorials
I found this error during the process, and after pouring in the path, I couldn’t solve it, so I checked the workspace and found the beginner_tutorials file, so the problem is in the execution
catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
The CD is not inside the src.
So if you find this problem, you can check the location of beginner_tutorials.
Solution: Just delete the beginner_tutorials and re-execute it.
After installing ROS in Ubuntu system, the apt-get update command reports an error:
W: An error occurred during the signature verification. The repository is not updated and the previous index files will be used. GPG error: http://packages.ros.org/ros/ubuntu bionic InRelease: The following signatures were invalid: EXPKEYSIG F42ED6FBAB17C654 Open Robotics <[email protected]>
W: Failed to fetch http://dl.google.com/linux/chrome/deb/dists/stable/InRelease Could not resolve 'dl.google.com'
W: Failed to fetch http://packages.ros.org/ros/ubuntu/dists/bionic/InRelease The following signatures were invalid: EXPKEYSIG F42ED6FBAB17C654 Open Robotics <[email protected]>
W: Failed to fetch http://packages.microsoft.com/repos/code/dists/stable/InRelease Could not resolve 'packages.microsoft.com'
W: Some index files failed to download. They have been ignored, or old ones used instead.
Solution:
we have to re-add the mentioned GPG key to the system by using command below
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654Ubuntu18. 04 + catkin for ROS melody_Make compile robot_Voice, the error message is as follows:,
Scanning dependencies of target iat_publish
[ 12%] Building CXX object robot_voice/CMakeFiles/iat_publish.dir/src/iat_publish.cpp.o
[ 25%] Building C object robot_voice/CMakeFiles/iat_publish.dir/src/linuxrec.c.o
cc1: warning: command line option ‘-std=c++11’ is valid for C++/ObjC++ but not for C
/home/mc/ros/vision/src/robot_voice/src/linuxrec.c:12:10: fatal error: alsa/asoundlib.h: 没有那个文件或目录
#include <alsa/asoundlib.h>
^~~~~~~~~~~~~~~~~~
compilation terminated.
robot_voice/CMakeFiles/iat_publish.dir/build.make:110: recipe for target 'robot_voice/CMakeFiles/iat_publish.dir/src/linuxrec.c.o' failed
make[2]: *** [robot_voice/CMakeFiles/iat_publish.dir/src/linuxrec.c.o] Error 1
CMakeFiles/Makefile2:449: recipe for target 'robot_voice/CMakeFiles/iat_publish.dir/all' failed
make[1]: *** [robot_voice/CMakeFiles/iat_publish.dir/all] Error 2
Makefile:140: recipe for target 'all' failed
make: *** [all] Error 2
Invoking "make -j12 -l12" failed
Solution:
sudo apt-get install libasound2-devOr
sudo yum install alsa-lib-devel1. Problem
HDL locationing Error:
Error: TF_DENORMALIZED_QUATERNION: Ignoring transform for
child_frame_id “odom” from authority “unknown_publisher” because of an
invalid quaternion in the transform (0.0 0.0 0.983641 0.122190)
2. Solution
From the error report can be seen, the tip is a quadratic number of problems, the key is to say that there is no normalization, the release of TF has strict requirements, the quadratic number must be normalized, that is, xyzw squared and equal to 1, if not equal to the error reported above, a simple calculation, the above error tip quadratic number is: (0.0 0.0 0.983641 0.122190), that is, 0.98364 1 2 + 0.12219 0 2 = 0.982480012981 0.983641^2 + 0.122190 ^2 = 0.9824800129810.983641^2 + 0.122190^2 = 0.982480012981, obviously not equal to 1, so there will be the above problem, the solution is also simple, before the output Do a normalization process can be.
Eigen::Quaterniond quatern = {0.0 0.0 0.983641 0.122190}; // w x y z
quatern.normalize();
odom_trans.transform.rotation.x = quatern.x();
odom_trans.transform.rotation.y = quatern.y();
odom_trans.transform.rotation.z = quatern.z();
odom_trans.transform.rotation.w = quatern.w();
odom_trans.header.stamp = stamp;
odom_trans.header.frame_id = "map";
odom_trans.child_frame_id = odom_child_frame_id;
tf_broadcaster.sendTransform(odom_trans);Problem: when I write my own code to debug the manipulator, there is a problem after the rosrun node, as shown in the figure below

Solution: add the following two sentences at the entrance of the main function
ros::NodeHandle nh;
ros::AsyncSpinner spinner(1);
The reason is that movegroupinterface depends on ROS spinning, so just add the above two sentences before movegroupinterface
The following problems are encountered when compiling vins-mono with catkin,
In file included from /usr/local/include/ceres/internal/parameter_dims.h:37,
from /usr/local/include/ceres/internal/autodiff.h:151,
from /usr/local/include/ceres/autodiff_cost_function.h:130,
from /usr/local/include/ceres/ceres.h:37,
from /home/matthew/projects/vinsmono/src/VINS-Mono/camera_model/src/calib/CameraCalibration.cc:20:
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:64:21: error: ‘integer_sequence’ is not a member of ‘std’
64 | struct SumImpl<std::integer_sequence<T, N, Ns...>> {
| ^~~~~~~~~~~~~~~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:64:21: error: ‘integer_sequence’ is not a member of ‘std’
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:64:46: error: wrong number of template arguments (3, should be 1)
64 | struct SumImpl<std::integer_sequence<T, N, Ns...>> {
| ^~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:60:8: note: provided for ‘template<class Seq> struct ceres::internal::SumImpl’
60 | struct SumImpl;
| ^~~~~~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:64:49: error: expected unqualified-id before ‘>’ token
64 | struct SumImpl<std::integer_sequence<T, N, Ns...>> {
| ^~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:71:21: error: ‘integer_sequence’ is not a member of ‘std’
71 | struct SumImpl<std::integer_sequence<T, N1, N2, Ns...>> {
| ^~~~~~~~~~~~~~~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:71:21: error: ‘integer_sequence’ is not a member of ‘std’
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:71:51: error: wrong number of template arguments (4, should be 1)
71 | struct SumImpl<std::integer_sequence<T, N1, N2, Ns...>> {
| ^~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:60:8: note: provided for ‘template<class Seq> struct ceres::internal::SumImpl’
60 | struct SumImpl;
| ^~~~~~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:71:54: error: expected unqualified-id before ‘>’ token
71 | struct SumImpl<std::integer_sequence<T, N1, N2, Ns...>> {
| ^~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:78:21: error: ‘integer_sequence’ is not a member of ‘std’
78 | struct SumImpl<std::integer_sequence<T, N1, N2, N3, N4, Ns...>> {
| ^~~~~~~~~~~~~~~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:78:21: error: ‘integer_sequence’ is not a member of ‘std’
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:78:59: error: wrong number of template arguments (6, should be 1)
78 | struct SumImpl<std::integer_sequence<T, N1, N2, N3, N4, Ns...>> {
| ^~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:60:8: note: provided for ‘template<class Seq> struct ceres::internal::SumImpl’
60 | struct SumImpl;
| ^~~~~~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:78:62: error: expected unqualified-id before ‘>’ token
78 | struct SumImpl<std::integer_sequence<T, N1, N2, N3, N4, Ns...>> {
| ^~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:85:21: error: ‘integer_sequence’ is not a member of ‘std’
85 | struct SumImpl<std::integer_sequence<T, N>> {
| ^~~~~~~~~~~~~~~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:85:21: error: ‘integer_sequence’ is not a member of ‘std’
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:85:41: error: wrong number of template arguments (2, should be 1)
85 | struct SumImpl<std::integer_sequence<T, N>> {
| ^
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:60:8: note: provided for ‘template<class Seq> struct ceres::internal::SumImpl’
60 | struct SumImpl;
| ^~~~~~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:85:42: error: expected unqualified-id before ‘>’ token
85 | struct SumImpl<std::integer_sequence<T, N>> {
| ^~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:91:21: error: ‘integer_sequence’ is not a member of ‘std’
91 | struct SumImpl<std::integer_sequence<T>> {
| ^~~~~~~~~~~~~~~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:91:21: error: ‘integer_sequence’ is not a member of ‘std’
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:91:38: error: template argument 1 is invalid
91 | struct SumImpl<std::integer_sequence<T>> {
| ^
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:91:39: error: expected unqualified-id before ‘>’ token
91 | struct SumImpl<std::integer_sequence<T>> {
| ^~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:135:31: error: ‘integer_sequence’ is not a member of ‘std’
135 | std::integer_sequence<T, N, Ns...>,
| ^~~~~~~~~~~~~~~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:135:31: error: ‘integer_sequence’ is not a member of ‘std’
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:135:59: error: template argument 3 is invalid
135 | std::integer_sequence<T, N, Ns...>,
| ^
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:135:59: error: type/value mismatch at argument 4 in template parameter list for ‘template<class T, T Sum, class SeqIn, class SeqOut> struct ceres::internal::ExclusiveScanImpl’
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:135:59: note: expected a type, got ‘N’
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:146:39: error: ‘integer_sequence’ is not a member of ‘std’
146 | struct ExclusiveScanImpl<T, Sum, std::integer_sequence<T>, SeqOut> {
| ^~~~~~~~~~~~~~~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:146:39: error: ‘integer_sequence’ is not a member of ‘std’
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:146:57: error: wrong number of template arguments (3, should be 4)
146 | struct ExclusiveScanImpl<T, Sum, std::integer_sequence<T>, SeqOut> {
| ^
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:130:8: note: provided for ‘template<class T, T Sum, class SeqIn, class SeqOut> struct ceres::internal::ExclusiveScanImpl’
130 | struct ExclusiveScanImpl;
| ^~~~~~~~~~~~~~~~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:160:53: error: ‘integer_sequence’ is not a member of ‘std’
160 | typename ExclusiveScanImpl<T, T(0), Seq, std::integer_sequence<T>>::Type;
| ^~~~~~~~~~~~~~~~
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:160:53: error: ‘integer_sequence’ is not a member of ‘std’
/usr/local/include/ceres/internal/integer_sequence_algorithm.h:160:70: error: template argument 4 is invalid
160 | typename ExclusiveScanImpl<T, T(0), Seq, std::integer_sequence<T>>::Type;
After checking, it is generally caused by the incompatibility between Ceres-solver and eigen3. You can’t use the latest version of Ceres when running vins-mono.
I had no choice but to uninstall the previous version 2.0.0 first.
sudo rm -r /usr/local/lib/cmake/Ceres
sudo rm -rf /usr/local/include/ceres /usr/local/lib/libceres.a
sudo rm -r /usr/local/share/CeresThen download version 1.14.0 here,
http://ceres-solver.org/ceres-solver-1.14.0.tar.gz
wget ceres-solver.org/ceres-solver-1.14.0.tar.gz
https://ceres-solver.googlesource.com/ceres-solver
cd ceres-solver-1.14.0
mkdir build
cd build
cmake ..
make -j4
make test
sudo make install
Compile ceres_curve_fiiting
CD to ceres_curve_fiiting folder
mkdir build
cd build
cmake ..
make
./curve_fitting
Compilation finished!
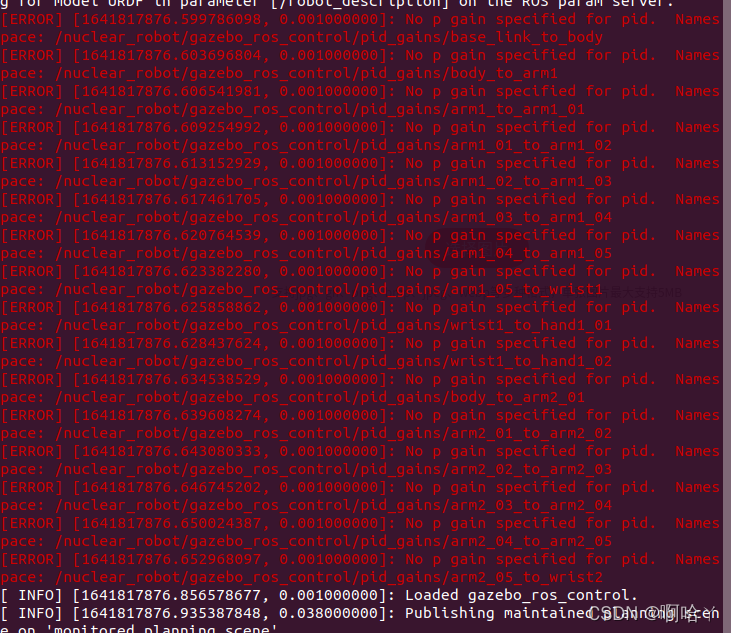
Error form:
[ERROR] [1641817876.599786098, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/base_ link_ to_ body [ERROR] [1641817876.603696804, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/body_ to_ arm1 [ERROR] [1641817876.606541981, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm1_ to_ arm1_ 01 [ERROR] [1641817876.609254992, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm1_ 01_ to_ arm1_ 02 [ERROR] [1641817876.613152929, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm1_ 02_ to_ arm1_ 03 [ERROR] [1641817876.617461705, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm1_ 03_ to_ arm1_ 04 [ERROR] [1641817876.620764539, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm1_ 04_ to_ arm1_ 05 [ERROR] [1641817876.623382280, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm1_ 05_ to_ wrist1 [ERROR] [1641817876.625858862, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/wrist1_ to_ hand1_ 01 [ERROR] [1641817876.628437624, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/wrist1_ to_ hand1_ 02 [ERROR] [1641817876.634538529, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/body_ to_ arm2_ 01 [ERROR] [1641817876.639608274, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm2_ 01_ to_ arm2_ 02 [ERROR] [1641817876.643080333, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm2_ 02_ to_ arm2_ 03 [ERROR] [1641817876.646745202, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm2_ 03_ to_ arm2_ 04 [ERROR] [1641817876.650024387, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm2_ 04_ to_ arm2_ 05 [ERROR] [1641817876.652968097, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm2_ 05_ to_ wrist2
Notice the black part I added in the previous errors, which is the namespace path required to configure the PID. The reason for this error is that the named path in the configuration file does not match the PID requirements.
Solution:
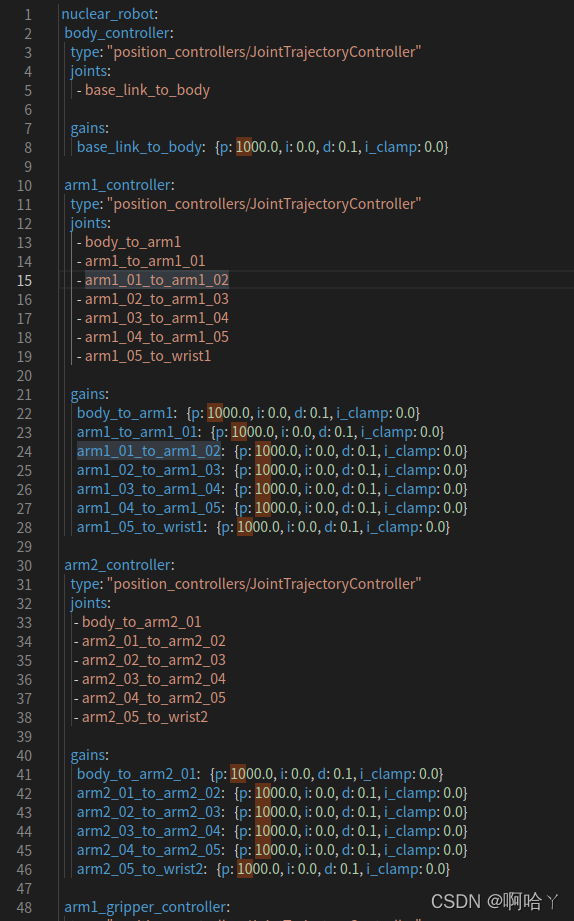
First, you need to go through the message output of the .launch command you ran. Look at the namespace path output after you read in the configuration file. The image below shows the namespace path when I reported the error, and the form of the configuration file.
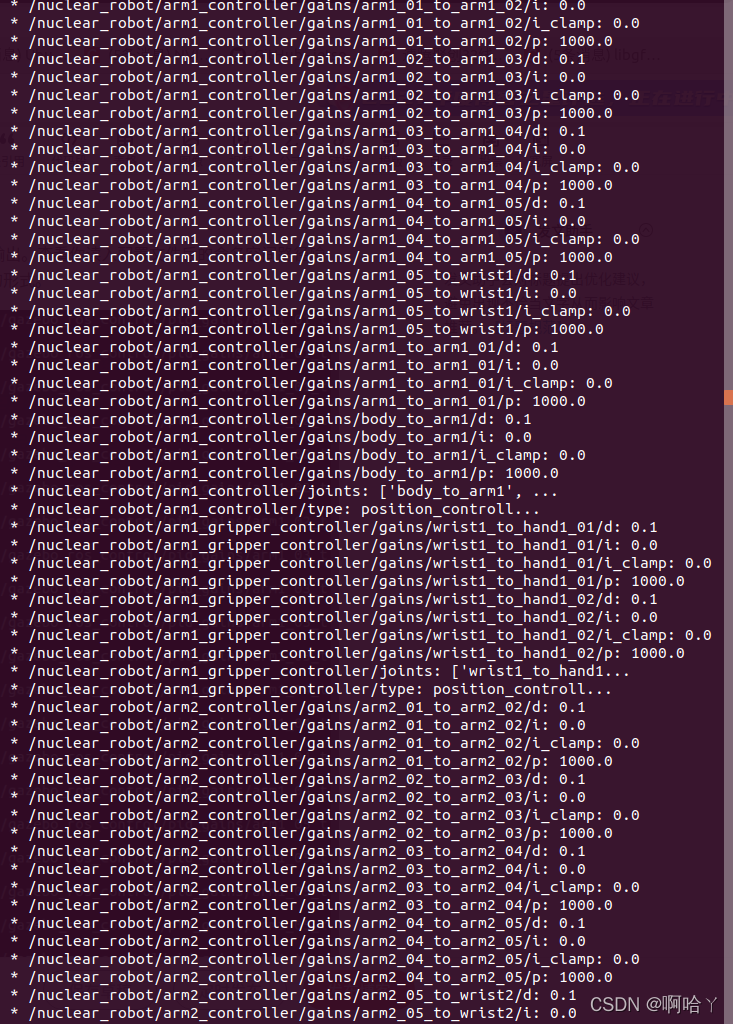
Differences in namespace paths can be seen at
Expected: Namespace: /nuclear_robot/gazebo_ros_control/pid_gains/~
Actual: Namespace: /nuclear_robot/arm1_controller/gains/~
So we need to make the configuration file changes based on the expected namespace path.
After initially just changing the configuration file in the gains to pid_gains and adding the line gazebo_ros_control before pid_gains, the problem is still not solved and the output is as follows.
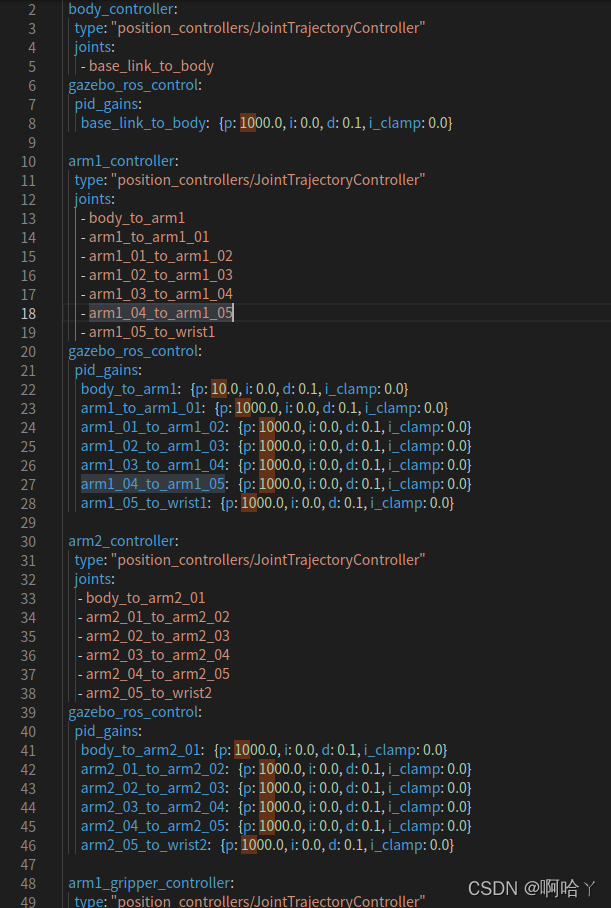
From the output log, I could see that only the last two joints were loaded with parameters when the configuration file was loaded, and the pid of the last two joints was missing from the output of the error report.
So I moved the pid configuration of each joint to the end, and the problem was solved.
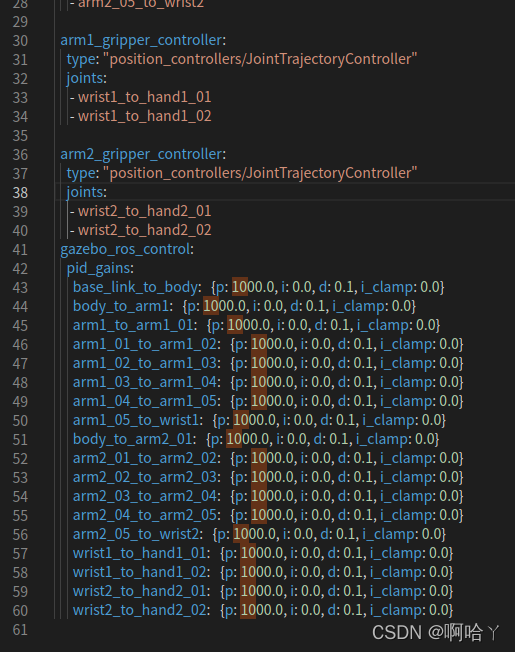
It should be noted that when rewriting the configuration file yaml, pay attention to the writing format and indentation (very important)
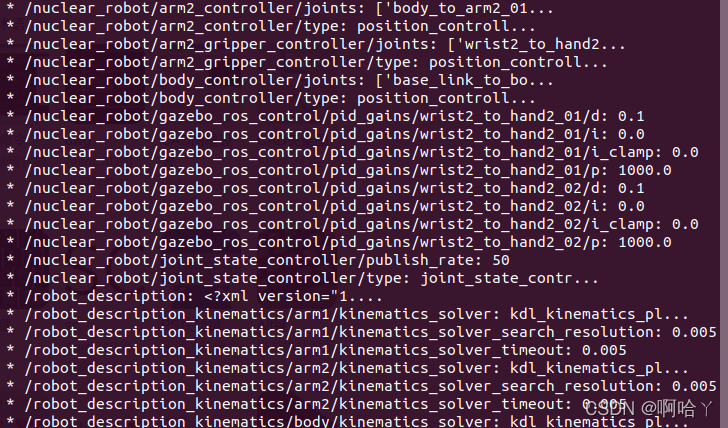
The following is the final output (there is no longer a large section of dazzling red error reports):
started roslaunch server http://localhost:41631/
SUMMARY
========
PARAMETERS
* /gazebo/enable_ros_network: True
* /move_group/allow_trajectory_execution: True
* /move_group/arm1/longest_valid_segment_fraction: 0.005
* /move_group/arm1/planner_configs: ['SBL', 'EST', 'L...
* /move_group/arm1/projection_evaluator: joints(body_to_ar...
* /move_group/arm1_gripper/longest_valid_segment_fraction: 0.005
* /move_group/arm1_gripper/planner_configs: ['SBL', 'EST', 'L...
* /move_group/arm1_gripper/projection_evaluator: joints(wrist1_to_...
* /move_group/arm2/longest_valid_segment_fraction: 0.005
* /move_group/arm2/planner_configs: ['SBL', 'EST', 'L...
* /move_group/arm2/projection_evaluator: joints(body_to_ar...
* /move_group/arm2_gripper/longest_valid_segment_fraction: 0.005
* /move_group/arm2_gripper/planner_configs: ['SBL', 'EST', 'L...
* /move_group/arm2_gripper/projection_evaluator: joints(wrist2_to_...
* /move_group/body/planner_configs: ['SBL', 'EST', 'L...
* /move_group/capabilities:
* /move_group/controller_list: [{'default': True...
* /move_group/controller_manager_ns: controller_manager
* /move_group/disable_capabilities:
* /move_group/jiggle_fraction: 0.05
* /move_group/max_range: 5.0
* /move_group/max_safe_path_cost: 1
* /move_group/moveit_controller_manager: moveit_simple_con...
* /move_group/moveit_manage_controllers: True
* /move_group/octomap_resolution: 0.025
* /move_group/planner_configs/BFMT/balanced: 0
* /move_group/planner_configs/BFMT/cache_cc: 1
* /move_group/planner_configs/BFMT/extended_fmt: 1
* /move_group/planner_configs/BFMT/heuristics: 1
* /move_group/planner_configs/BFMT/nearest_k: 1
* /move_group/planner_configs/BFMT/num_samples: 1000
* /move_group/planner_configs/BFMT/optimality: 1
* /move_group/planner_configs/BFMT/radius_multiplier: 1.0
* /move_group/planner_configs/BFMT/type: geometric::BFMT
* /move_group/planner_configs/BKPIECE/border_fraction: 0.9
* /move_group/planner_configs/BKPIECE/failed_expansion_score_factor: 0.5
* /move_group/planner_configs/BKPIECE/min_valid_path_fraction: 0.5
* /move_group/planner_configs/BKPIECE/range: 0.0
* /move_group/planner_configs/BKPIECE/type: geometric::BKPIECE
* /move_group/planner_configs/BiEST/range: 0.0
* /move_group/planner_configs/BiEST/type: geometric::BiEST
* /move_group/planner_configs/BiTRRT/cost_threshold: 1e300
* /move_group/planner_configs/BiTRRT/frountier_node_ratio: 0.1
* /move_group/planner_configs/BiTRRT/frountier_threshold: 0.0
* /move_group/planner_configs/BiTRRT/init_temperature: 100
* /move_group/planner_configs/BiTRRT/range: 0.0
* /move_group/planner_configs/BiTRRT/temp_change_factor: 0.1
* /move_group/planner_configs/BiTRRT/type: geometric::BiTRRT
* /move_group/planner_configs/EST/goal_bias: 0.05
* /move_group/planner_configs/EST/range: 0.0
* /move_group/planner_configs/EST/type: geometric::EST
* /move_group/planner_configs/FMT/cache_cc: 1
* /move_group/planner_configs/FMT/extended_fmt: 1
* /move_group/planner_configs/FMT/heuristics: 0
* /move_group/planner_configs/FMT/nearest_k: 1
* /move_group/planner_configs/FMT/num_samples: 1000
* /move_group/planner_configs/FMT/radius_multiplier: 1.1
* /move_group/planner_configs/FMT/type: geometric::FMT
* /move_group/planner_configs/KPIECE/border_fraction: 0.9
* /move_group/planner_configs/KPIECE/failed_expansion_score_factor: 0.5
* /move_group/planner_configs/KPIECE/goal_bias: 0.05
* /move_group/planner_configs/KPIECE/min_valid_path_fraction: 0.5
* /move_group/planner_configs/KPIECE/range: 0.0
* /move_group/planner_configs/KPIECE/type: geometric::KPIECE
* /move_group/planner_configs/LBKPIECE/border_fraction: 0.9
* /move_group/planner_configs/LBKPIECE/min_valid_path_fraction: 0.5
* /move_group/planner_configs/LBKPIECE/range: 0.0
* /move_group/planner_configs/LBKPIECE/type: geometric::LBKPIECE
* /move_group/planner_configs/LBTRRT/epsilon: 0.4
* /move_group/planner_configs/LBTRRT/goal_bias: 0.05
* /move_group/planner_configs/LBTRRT/range: 0.0
* /move_group/planner_configs/LBTRRT/type: geometric::LBTRRT
* /move_group/planner_configs/LazyPRM/range: 0.0
* /move_group/planner_configs/LazyPRM/type: geometric::LazyPRM
* /move_group/planner_configs/LazyPRMstar/type: geometric::LazyPR...
* /move_group/planner_configs/PDST/type: geometric::PDST
* /move_group/planner_configs/PRM/max_nearest_neighbors: 10
* /move_group/planner_configs/PRM/type: geometric::PRM
* /move_group/planner_configs/PRMstar/type: geometric::PRMstar
* /move_group/planner_configs/ProjEST/goal_bias: 0.05
* /move_group/planner_configs/ProjEST/range: 0.0
* /move_group/planner_configs/ProjEST/type: geometric::ProjEST
* /move_group/planner_configs/RRT/goal_bias: 0.05
* /move_group/planner_configs/RRT/range: 0.0
* /move_group/planner_configs/RRT/type: geometric::RRT
* /move_group/planner_configs/RRTConnect/range: 0.0
* /move_group/planner_configs/RRTConnect/type: geometric::RRTCon...
* /move_group/planner_configs/RRTstar/delay_collision_checking: 1
* /move_group/planner_configs/RRTstar/goal_bias: 0.05
* /move_group/planner_configs/RRTstar/range: 0.0
* /move_group/planner_configs/RRTstar/type: geometric::RRTstar
* /move_group/planner_configs/SBL/range: 0.0
* /move_group/planner_configs/SBL/type: geometric::SBL
* /move_group/planner_configs/SPARS/dense_delta_fraction: 0.001
* /move_group/planner_configs/SPARS/max_failures: 1000
* /move_group/planner_configs/SPARS/sparse_delta_fraction: 0.25
* /move_group/planner_configs/SPARS/stretch_factor: 3.0
* /move_group/planner_configs/SPARS/type: geometric::SPARS
* /move_group/planner_configs/SPARStwo/dense_delta_fraction: 0.001
* /move_group/planner_configs/SPARStwo/max_failures: 5000
* /move_group/planner_configs/SPARStwo/sparse_delta_fraction: 0.25
* /move_group/planner_configs/SPARStwo/stretch_factor: 3.0
* /move_group/planner_configs/SPARStwo/type: geometric::SPARStwo
* /move_group/planner_configs/STRIDE/degree: 16
* /move_group/planner_configs/STRIDE/estimated_dimension: 0.0
* /move_group/planner_configs/STRIDE/goal_bias: 0.05
* /move_group/planner_configs/STRIDE/max_degree: 18
* /move_group/planner_configs/STRIDE/max_pts_per_leaf: 6
* /move_group/planner_configs/STRIDE/min_degree: 12
* /move_group/planner_configs/STRIDE/min_valid_path_fraction: 0.2
* /move_group/planner_configs/STRIDE/range: 0.0
* /move_group/planner_configs/STRIDE/type: geometric::STRIDE
* /move_group/planner_configs/STRIDE/use_projected_distance: 0
* /move_group/planner_configs/TRRT/frountierNodeRatio: 0.1
* /move_group/planner_configs/TRRT/frountier_threshold: 0.0
* /move_group/planner_configs/TRRT/goal_bias: 0.05
* /move_group/planner_configs/TRRT/init_temperature: 10e-6
* /move_group/planner_configs/TRRT/k_constant: 0.0
* /move_group/planner_configs/TRRT/max_states_failed: 10
* /move_group/planner_configs/TRRT/min_temperature: 10e-10
* /move_group/planner_configs/TRRT/range: 0.0
* /move_group/planner_configs/TRRT/temp_change_factor: 2.0
* /move_group/planner_configs/TRRT/type: geometric::TRRT
* /move_group/planning_plugin: ompl_interface/OM...
* /move_group/planning_scene_monitor/publish_geometry_updates: True
* /move_group/planning_scene_monitor/publish_planning_scene: True
* /move_group/planning_scene_monitor/publish_state_updates: True
* /move_group/planning_scene_monitor/publish_transforms_updates: True
* /move_group/request_adapters: default_planner_r...
* /move_group/sensors: [{'point_subsampl...
* /move_group/start_state_max_bounds_error: 0.1
* /move_group/trajectory_execution/allowed_execution_duration_scaling: 1.2
* /move_group/trajectory_execution/allowed_goal_duration_margin: 0.5
* /move_group/trajectory_execution/allowed_start_tolerance: 0.01
* /nuclear_robot/arm1_controller/joints: ['body_to_arm1', ...
* /nuclear_robot/arm1_controller/type: position_controll...
* /nuclear_robot/arm1_gripper_controller/joints: ['wrist1_to_hand1...
* /nuclear_robot/arm1_gripper_controller/type: position_controll...
* /nuclear_robot/arm2_controller/joints: ['body_to_arm2_01...
* /nuclear_robot/arm2_controller/type: position_controll...
* /nuclear_robot/arm2_gripper_controller/joints: ['wrist2_to_hand2...
* /nuclear_robot/arm2_gripper_controller/type: position_controll...
* /nuclear_robot/body_controller/joints: ['base_link_to_bo...
* /nuclear_robot/body_controller/type: position_controll...
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_01_to_arm1_02/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_01_to_arm1_02/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_01_to_arm1_02/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_01_to_arm1_02/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_02_to_arm1_03/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_02_to_arm1_03/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_02_to_arm1_03/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_02_to_arm1_03/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_03_to_arm1_04/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_03_to_arm1_04/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_03_to_arm1_04/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_03_to_arm1_04/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_04_to_arm1_05/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_04_to_arm1_05/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_04_to_arm1_05/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_04_to_arm1_05/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_05_to_wrist1/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_05_to_wrist1/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_05_to_wrist1/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_05_to_wrist1/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_to_arm1_01/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_to_arm1_01/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_to_arm1_01/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_to_arm1_01/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_01_to_arm2_02/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_01_to_arm2_02/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_01_to_arm2_02/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_01_to_arm2_02/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_02_to_arm2_03/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_02_to_arm2_03/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_02_to_arm2_03/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_02_to_arm2_03/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_03_to_arm2_04/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_03_to_arm2_04/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_03_to_arm2_04/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_03_to_arm2_04/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_04_to_arm2_05/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_04_to_arm2_05/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_04_to_arm2_05/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_04_to_arm2_05/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_05_to_wrist2/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_05_to_wrist2/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_05_to_wrist2/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_05_to_wrist2/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/base_link_to_body/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/base_link_to_body/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/base_link_to_body/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/base_link_to_body/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm1/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm1/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm1/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm1/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm2_01/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm2_01/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm2_01/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm2_01/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_01/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_01/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_01/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_01/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_02/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_02/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_02/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_02/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_01/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_01/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_01/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_01/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_02/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_02/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_02/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_02/p: 1000.0
* /nuclear_robot/joint_state_controller/publish_rate: 50
* /nuclear_robot/joint_state_controller/type: joint_state_contr...
* /robot_description: <?xml version="1....
* /robot_description_kinematics/arm1/kinematics_solver: kdl_kinematics_pl...
* /robot_description_kinematics/arm1/kinematics_solver_search_resolution: 0.005
* /robot_description_kinematics/arm1/kinematics_solver_timeout: 0.005
* /robot_description_kinematics/arm2/kinematics_solver: kdl_kinematics_pl...
* /robot_description_kinematics/arm2/kinematics_solver_search_resolution: 0.005
* /robot_description_kinematics/arm2/kinematics_solver_timeout: 0.005
* /robot_description_kinematics/body/kinematics_solver: kdl_kinematics_pl...
* /robot_description_kinematics/body/kinematics_solver_search_resolution: 0.005
* /robot_description_kinematics/body/kinematics_solver_timeout: 0.005
* /robot_description_planning/joint_limits/arm1_01_to_arm1_02/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm1_01_to_arm1_02/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm1_01_to_arm1_02/max_acceleration: 0
* /robot_description_planning/joint_limits/arm1_01_to_arm1_02/max_velocity: 0
* /robot_description_planning/joint_limits/arm1_02_to_arm1_03/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm1_02_to_arm1_03/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm1_02_to_arm1_03/max_acceleration: 0
* /robot_description_planning/joint_limits/arm1_02_to_arm1_03/max_velocity: 0
* /robot_description_planning/joint_limits/arm1_03_to_arm1_04/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm1_03_to_arm1_04/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm1_03_to_arm1_04/max_acceleration: 0
* /robot_description_planning/joint_limits/arm1_03_to_arm1_04/max_velocity: 0
* /robot_description_planning/joint_limits/arm1_04_to_arm1_05/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm1_04_to_arm1_05/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm1_04_to_arm1_05/max_acceleration: 0
* /robot_description_planning/joint_limits/arm1_04_to_arm1_05/max_velocity: 0
* /robot_description_planning/joint_limits/arm1_05_to_wrist1/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm1_05_to_wrist1/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm1_05_to_wrist1/max_acceleration: 0
* /robot_description_planning/joint_limits/arm1_05_to_wrist1/max_velocity: 0
* /robot_description_planning/joint_limits/arm1_to_arm1_01/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm1_to_arm1_01/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm1_to_arm1_01/max_acceleration: 0
* /robot_description_planning/joint_limits/arm1_to_arm1_01/max_velocity: 0
* /robot_description_planning/joint_limits/arm2_01_to_arm2_02/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm2_01_to_arm2_02/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm2_01_to_arm2_02/max_acceleration: 0
* /robot_description_planning/joint_limits/arm2_01_to_arm2_02/max_velocity: 0
* /robot_description_planning/joint_limits/arm2_02_to_arm2_03/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm2_02_to_arm2_03/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm2_02_to_arm2_03/max_acceleration: 0
* /robot_description_planning/joint_limits/arm2_02_to_arm2_03/max_velocity: 0
* /robot_description_planning/joint_limits/arm2_03_to_arm2_04/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm2_03_to_arm2_04/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm2_03_to_arm2_04/max_acceleration: 0
* /robot_description_planning/joint_limits/arm2_03_to_arm2_04/max_velocity: 0
* /robot_description_planning/joint_limits/arm2_04_to_arm2_05/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm2_04_to_arm2_05/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm2_04_to_arm2_05/max_acceleration: 0
* /robot_description_planning/joint_limits/arm2_04_to_arm2_05/max_velocity: 0
* /robot_description_planning/joint_limits/arm2_05_to_wrist2/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm2_05_to_wrist2/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm2_05_to_wrist2/max_acceleration: 0
* /robot_description_planning/joint_limits/arm2_05_to_wrist2/max_velocity: 0
* /robot_description_planning/joint_limits/base_link_to_body/has_acceleration_limits: False
* /robot_description_planning/joint_limits/base_link_to_body/has_velocity_limits: False
* /robot_description_planning/joint_limits/base_link_to_body/max_acceleration: 0
* /robot_description_planning/joint_limits/base_link_to_body/max_velocity: 0
* /robot_description_planning/joint_limits/body_to_arm1/has_acceleration_limits: False
* /robot_description_planning/joint_limits/body_to_arm1/has_velocity_limits: False
* /robot_description_planning/joint_limits/body_to_arm1/max_acceleration: 0
* /robot_description_planning/joint_limits/body_to_arm1/max_velocity: 0
* /robot_description_planning/joint_limits/body_to_arm2_01/has_acceleration_limits: False
* /robot_description_planning/joint_limits/body_to_arm2_01/has_velocity_limits: False
* /robot_description_planning/joint_limits/body_to_arm2_01/max_acceleration: 0
* /robot_description_planning/joint_limits/body_to_arm2_01/max_velocity: 0
* /robot_description_planning/joint_limits/wrist1_to_hand1_01/has_acceleration_limits: False
* /robot_description_planning/joint_limits/wrist1_to_hand1_01/has_velocity_limits: False
* /robot_description_planning/joint_limits/wrist1_to_hand1_01/max_acceleration: 0
* /robot_description_planning/joint_limits/wrist1_to_hand1_01/max_velocity: 0
* /robot_description_planning/joint_limits/wrist1_to_hand1_02/has_acceleration_limits: False
* /robot_description_planning/joint_limits/wrist1_to_hand1_02/has_velocity_limits: False
* /robot_description_planning/joint_limits/wrist1_to_hand1_02/max_acceleration: 0
* /robot_description_planning/joint_limits/wrist1_to_hand1_02/max_velocity: 0
* /robot_description_planning/joint_limits/wrist2_to_hand2_01/has_acceleration_limits: False
* /robot_description_planning/joint_limits/wrist2_to_hand2_01/has_velocity_limits: False
* /robot_description_planning/joint_limits/wrist2_to_hand2_01/max_acceleration: 0
* /robot_description_planning/joint_limits/wrist2_to_hand2_01/max_velocity: 0
* /robot_description_planning/joint_limits/wrist2_to_hand2_02/has_acceleration_limits: False
* /robot_description_planning/joint_limits/wrist2_to_hand2_02/has_velocity_limits: False
* /robot_description_planning/joint_limits/wrist2_to_hand2_02/max_acceleration: 0
* /robot_description_planning/joint_limits/wrist2_to_hand2_02/max_velocity: 0
* /robot_description_semantic: <?xml version="1....
* /rosdistro: melodic
* /rosversion: 1.14.12
* /use_sim_time: True
NODES
/
gazebo (gazebo_ros/gzserver)
gazebo_gui (gazebo_ros/gzclient)
move_group (moveit_ros_move_group/move_group)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
rviz_xavier_3542_1884457764229678358 (rviz/rviz)
urdf_spawner (gazebo_ros/spawn_model)
/nuclear_robot/
arm_controller_spawner (controller_manager/spawner)
joint_controller_spawner (controller_manager/spawner)
auto-starting new master
process[master]: started with pid [3556]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 4bb68466-7212-11ec-be33-1cbfcea047cb
process[rosout-1]: started with pid [3570]
started core service [/rosout]
process[gazebo-2]: started with pid [3588]
process[gazebo_gui-3]: started with pid [3593]
process[urdf_spawner-4]: started with pid [3598]
process[nuclear_robot/joint_controller_spawner-5]: started with pid [3600]
process[robot_state_publisher-6]: started with pid [3601]
process[nuclear_robot/arm_controller_spawner-7]: started with pid [3602]
process[move_group-8]: started with pid [3607]
process[rviz_xavier_3542_1884457764229678358-9]: started with pid [3617]
[ INFO] [1641818347.545128890]: Loading robot model 'nuclear_robot'...
[ INFO] [1641818347.715709828]: rviz version 1.13.23
[ INFO] [1641818347.715824138]: compiled against Qt version 5.9.5
[ INFO] [1641818347.715864397]: compiled against OGRE version 1.9.0 (Ghadamon)
[ INFO] [1641818347.749134869]: Forcing OpenGl version 0.
[INFO] [1641818348.011125, 0.000000]: Controller Spawner: Waiting for service controller_manager/load_controller
[INFO] [1641818348.055441, 0.000000]: Controller Spawner: Waiting for service controller_manager/load_controller
[ INFO] [1641818348.547783589]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1641818348.559743776]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[ INFO] [1641818348.566375745]: Stereo is NOT SUPPORTED
[ INFO] [1641818348.566578700]: OpenGL device: NVIDIA Tegra Xavier (nvgpu)/integrated
[ INFO] [1641818348.566671761]: OpenGl version: 4.6 (GLSL 4.6).
[ INFO] [1641818348.718173637]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1641818348.731496713]: waitForService: Service [/gazebo_gui/set_physics_properties] has not been advertised, waiting...
[INFO] [1641818349.077115, 0.000000]: Loading model XML from ros parameter robot_description
[INFO] [1641818349.117439, 0.000000]: Waiting for service /gazebo/spawn_urdf_model
[ INFO] [1641818349.851304741]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[INFO] [1641818350.047844, 0.065000]: Calling service /gazebo/spawn_urdf_model
[INFO] [1641818350.455892, 0.191000]: Spawn status: SpawnModel: Successfully spawned entity
[ INFO] [1641818350.504658217, 0.191000000]: Physics dynamic reconfigure ready.
[urdf_spawner-4] process has finished cleanly
log file: /home/nvidia/.ros/log/4bb68466-7212-11ec-be33-1cbfcea047cb/urdf_spawner-4*.log
[ INFO] [1641818351.543491188, 0.191000000]: Loading gazebo_ros_control plugin
[ INFO] [1641818351.543737345, 0.191000000]: Starting gazebo_ros_control plugin in namespace: /nuclear_robot
[ INFO] [1641818351.545993945, 0.191000000]: gazebo_ros_control plugin is waiting for model URDF in parameter [/robot_description] on the ROS param server.
[ INFO] [1641818351.770328428, 0.191000000]: Publishing maintained planning scene on 'monitored_planning_scene'
[ INFO] [1641818351.786675984, 0.191000000]: MoveGroup debug mode is ON
Starting planning scene monitors...
[ INFO] [1641818351.786780950, 0.191000000]: Starting planning scene monitor
[ INFO] [1641818351.805653249, 0.191000000]: Listening to '/planning_scene'
[ INFO] [1641818351.805806761, 0.191000000]: Starting world geometry update monitor for collision objects, attached objects, octomap updates.
[ INFO] [1641818351.826313355, 0.191000000]: Listening to '/collision_object'
[ INFO] [1641818351.848235576, 0.191000000]: Listening to '/planning_scene_world' for planning scene world geometry
[ INFO] [1641818353.272323132, 0.191000000]: Loaded gazebo_ros_control.
[ INFO] [1641818353.434858522, 0.267000000]: Loading robot model 'nuclear_robot'...
[INFO] [1641818353.512072, 0.297000]: Controller Spawner: Waiting for service controller_manager/switch_controller
[INFO] [1641818353.536834, 0.306000]: Controller Spawner: Waiting for service controller_manager/unload_controller
[INFO] [1641818353.546685, 0.309000]: Controller Spawner: Waiting for service controller_manager/switch_controller
[INFO] [1641818353.553371, 0.312000]: Loading controller: joint_state_controller
[INFO] [1641818353.571423, 0.319000]: Controller Spawner: Waiting for service controller_manager/unload_controller
[INFO] [1641818353.592808, 0.327000]: Loading controller: body_controller
[INFO] [1641818353.649680, 0.349000]: Controller Spawner: Loaded controllers: joint_state_controller
[INFO] [1641818353.971944, 0.481000]: Loading controller: arm1_controller
[INFO] [1641818353.975383, 0.483000]: Started controllers: joint_state_controller
[INFO] [1641818354.369832, 0.643000]: Loading controller: arm2_controller
[INFO] [1641818354.838744, 0.890000]: Loading controller: arm1_gripper_controller
[INFO] [1641818355.158097, 1.074000]: Loading controller: arm2_gripper_controller
[INFO] [1641818355.530871, 1.273000]: Controller Spawner: Loaded controllers: body_controller, arm1_controller, arm2_controller, arm1_gripper_controller, arm2_gripper_controller
[INFO] [1641818355.572662, 1.305000]: Started controllers: body_controller, arm1_controller, arm2_controller, arm1_gripper_controller, arm2_gripper_controller
[ INFO] [1641818358.639781941, 2.912000000]: Starting planning scene monitor
[ INFO] [1641818358.668084437, 2.931000000]: Listening to '/move_group/monitored_planning_scene'
[ INFO] [1641818359.836115338, 3.608000000]: waitForService: Service [/get_planning_scene] has not been advertised, waiting...
[ INFO] [1641818364.846962463, 6.492000000]: Failed to call service get_planning_scene, have you launched move_group or called psm.providePlanningSceneService()?
[ INFO] [1641818364.847315762, 6.492000000]: Constructing new MoveGroup connection for group 'arm1' in namespace ''
[ INFO] [1641818372.590419868, 11.084000000]: Listening to '/head_mount_kinect/depth_registered/points' using message filter with target frame 'base_footprint '
[ INFO] [1641818372.635730211, 11.110000000]: Listening to '/attached_collision_object' for attached collision objects
Planning scene monitors started.
[ INFO] [1641818372.705597859, 11.153000000]: Initializing OMPL interface using ROS parameters
[ INFO] [1641818373.225410564, 11.469000000]: Using planning interface 'OMPL'
[ INFO] [1641818373.237741139, 11.476000000]: Param 'default_workspace_bounds' was not set. Using default value: 10
[ INFO] [1641818373.245810079, 11.480000000]: Param 'start_state_max_bounds_error' was set to 0.1
[ INFO] [1641818373.248707577, 11.481000000]: Param 'start_state_max_dt' was not set. Using default value: 0.5
[ INFO] [1641818373.251800798, 11.483000000]: Param 'start_state_max_dt' was not set. Using default value: 0.5
[ INFO] [1641818373.254419081, 11.485000000]: Param 'jiggle_fraction' was set to 0.05
[ INFO] [1641818373.256732420, 11.486000000]: Param 'max_sampling_attempts' was not set. Using default value: 100
[ INFO] [1641818373.256952847, 11.487000000]: Using planning request adapter 'Add Time Parameterization'
[ INFO] [1641818373.257069942, 11.487000000]: Using planning request adapter 'Fix Workspace Bounds'
[ INFO] [1641818373.257232158, 11.487000000]: Using planning request adapter 'Fix Start State Bounds'
[ INFO] [1641818373.257344580, 11.487000000]: Using planning request adapter 'Fix Start State In Collision'
[ INFO] [1641818373.257447402, 11.487000000]: Using planning request adapter 'Fix Start State Path Constraints'
[ INFO] [1641818373.590199704, 11.685000000]: Added FollowJointTrajectory controller for nuclear_robot/body_controller
[ INFO] [1641818373.903175756, 11.878000000]: Added FollowJointTrajectory controller for nuclear_robot/arm1_controller
[ INFO] [1641818374.116014519, 12.016000000]: Added FollowJointTrajectory controller for nuclear_robot/arm2_controller
[ INFO] [1641818374.531673849, 12.239000000]: Added FollowJointTrajectory controller for nuclear_robot/arm1_gripper_controller
[ INFO] [1641818374.824725386, 12.420000000]: Added FollowJointTrajectory controller for nuclear_robot/arm2_gripper_controller
[ INFO] [1641818374.824951318, 12.422000000]: Returned 5 controllers in list
[ INFO] [1641818374.904395635, 12.466000000]: Trajectory execution is managing controllers
Loading 'move_group/ApplyPlanningSceneService'...
Loading 'move_group/ClearOctomapService'...
Loading 'move_group/MoveGroupCartesianPathService'...
Loading 'move_group/MoveGroupExecuteTrajectoryAction'...
Loading 'move_group/MoveGroupGetPlanningSceneService'...
Loading 'move_group/MoveGroupKinematicsService'...
Loading 'move_group/MoveGroupMoveAction'...
Loading 'move_group/MoveGroupPickPlaceAction'...
Loading 'move_group/MoveGroupPlanService'...
Loading 'move_group/MoveGroupQueryPlannersService'...
Loading 'move_group/MoveGroupStateValidationService'...
[ INFO] [1641818375.401474395, 12.760000000]:
********************************************************
* MoveGroup using:
* - ApplyPlanningSceneService
* - ClearOctomapService
* - CartesianPathService
* - ExecuteTrajectoryAction
* - GetPlanningSceneService
* - KinematicsService
* - MoveAction
* - PickPlaceAction
* - MotionPlanService
* - QueryPlannersService
* - StateValidationService
********************************************************
[ INFO] [1641818375.401743977, 12.760000000]: MoveGroup context using planning plugin ompl_interface/OMPLPlanner
[ INFO] [1641818375.401805836, 12.760000000]: MoveGroup context initialization complete
You can start planning now!
ERROR: cannot launch node of type [amcl/amcl]: amcl
ROS path [0]=/opt/ros/kinetic/share/ros
ROS path [1]=/home/robot/catkin_ws/src
ROS path [2]=/opt/ros/kinetic/share
ERROR: cannot launch node of type [move_base/move_base]: move_base
ROS path [0]=/opt/ros/kinetic/share/ros
ROS path [1]=/home/robot/catkin_ws/src
ROS path [2]=/opt/ros/kinetic/share
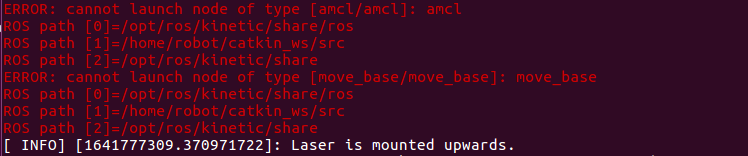
Solution:
sudo apt-get install ros-kinetic-navigation