Question
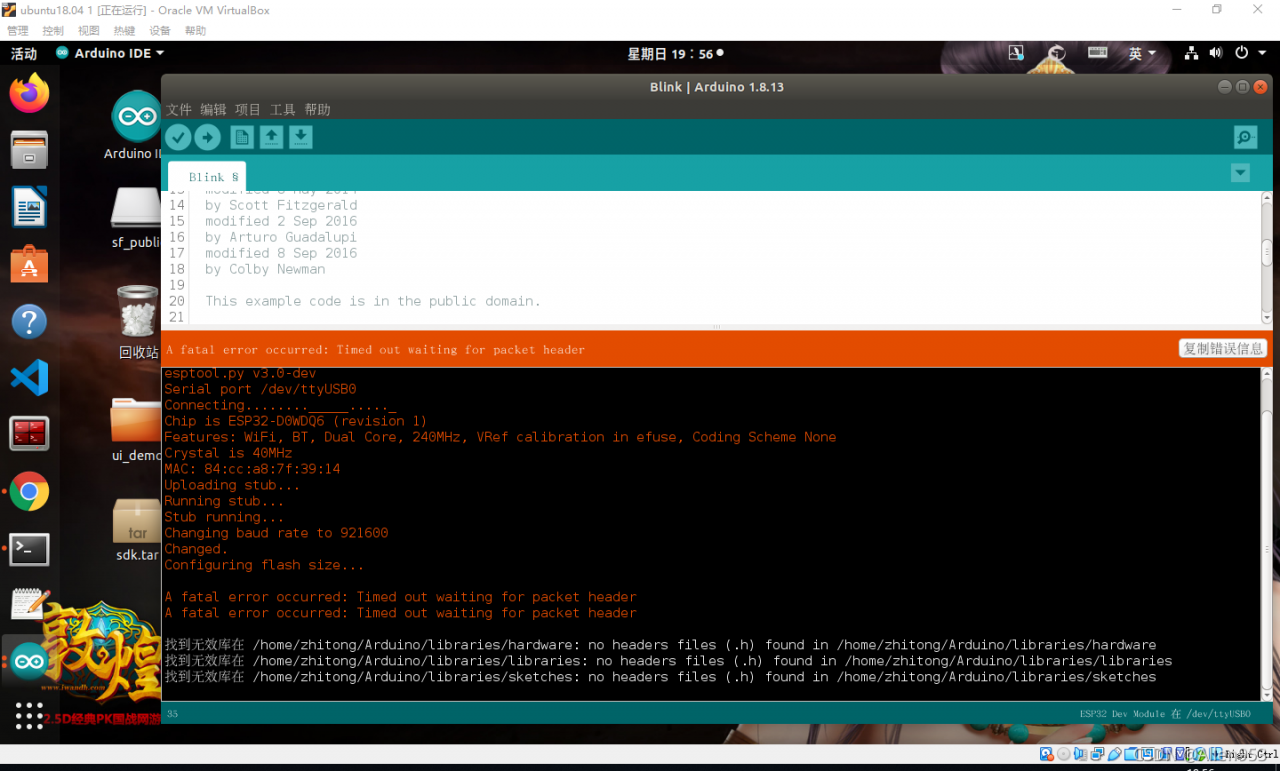
When I download the program to esp32 with Arduino IDE, the following error message appears:
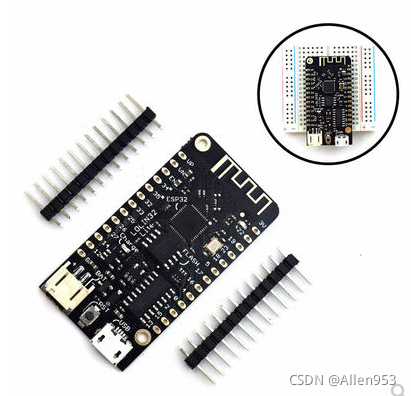
My board is the following Board:
Causes and Solutions
The reason is that there is an error in the baud rate selection. The baud rate I selected is 921600 by default. In fact, 115200 should be selected. In this way, you can download normally after downloading again.
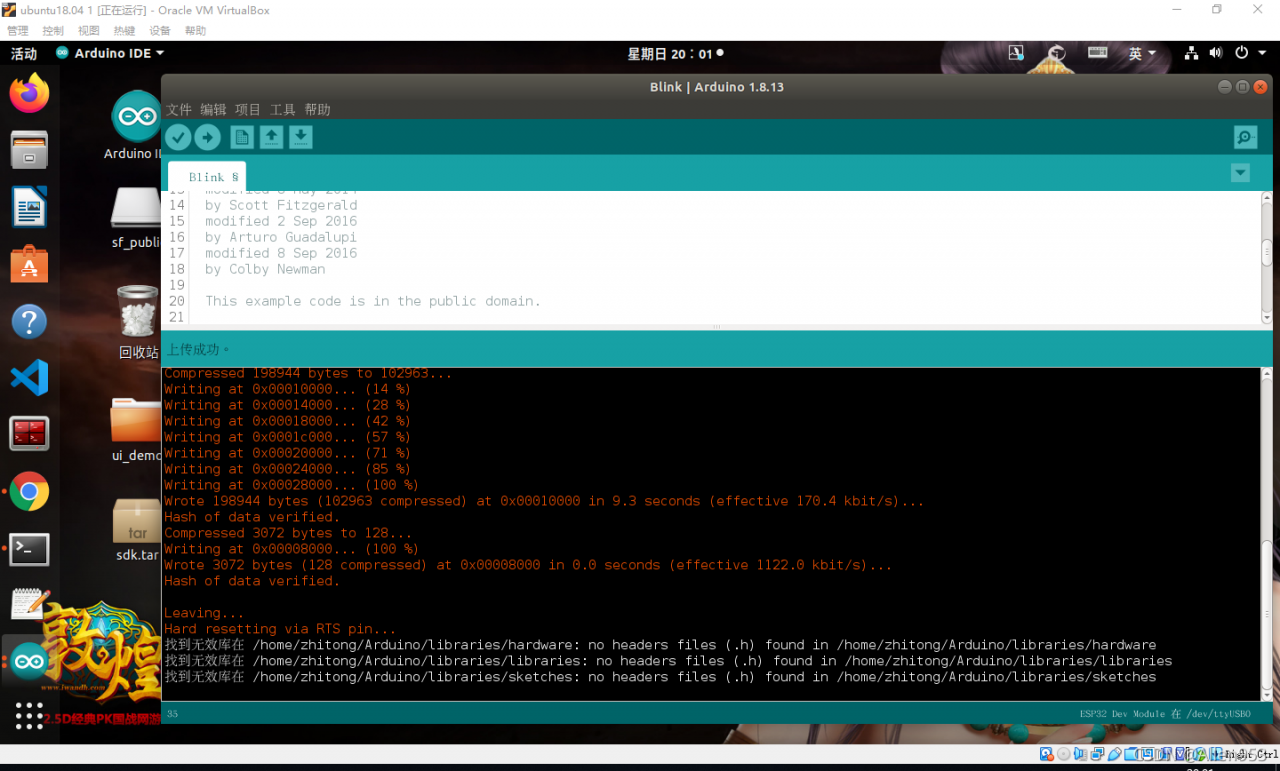
As shown in the figure below, it is successful.