Problem:
I have written some code based on Hikvision’s sdk for controlling the camera. One section of the program is mainly used to get NVR channel configuration information
The codes is as below:
I use the function NET_DVR_GetDVRConfig
#include #include "HCNetSDK.h" int main() { NET_DVR_Init(); //Set connection time and reconnect time NET_DVR_SetConnectTime(2000, 1); NET_DVR_SetReconnect(10000, true); // 注册设备 LONG lUserID; //Login parameters, including device address, login user, password, etc. NET_DVR_USER_LOGIN_INFO struLoginInfo = { 0 }; struLoginInfo.bUseAsynLogin = 0; //同步登录方式 strcpy(struLoginInfo.sDeviceAddress, "192.168.20.106"); //设备IP地址 struLoginInfo.wPort = 8000; //设备服务端口 strcpy(struLoginInfo.sUserName, "admin"); //设备登录用户名 strcpy(struLoginInfo.sPassword, "111111hk"); //设备登录密码 //设备信息, 输出参数 NET_DVR_DEVICEINFO_V40 struDeviceInfoV40 = { 0 }; lUserID = NET_DVR_Login_V40(&struLoginInfo, &struDeviceInfoV40); if (lUserID < 0) { printf("Login failed, error code: %d\n", NET_DVR_GetLastError()); NET_DVR_Cleanup(); return -1; } NET_DVR_IPPARACFG_V40 ipcfg; DWORD bytesReturned = 0; ipcfg.dwSize = sizeof(NET_DVR_IPPARACFG_V40); int iGroupNO = 0; bool resCode = NET_DVR_GetDVRConfig(lUserID, NET_DVR_GET_IPPARACFG_V40, iGroupNO, &ipcfg, sizeof(NET_DVR_IPPARACFG_V40), &bytesReturned); if (! resCode) { DWORD code = NET_DVR_GetLastError(); std::cout << "NET_DVR_GetDVRConfig failed " << NET_DVR_GetErrorMsg((LONG*)(&code)) << std::endl; NET_DVR_Logout(lUserID); NET_DVR_Cleanup(); return -1; } std::cout << "设备组 " << ipcfg.dwGroupNum << " 数字通道个数 " << ipcfg.dwDChanNum << " 起始通道 " << ipcfg.dwStartDChan << std::endl << std::endl; for (int i = 0; i < ipcfg.dwDChanNum; i++) { NET_DVR_PICCFG_V30 channelInfo; bytesReturned = 0; channelInfo.dwSize = sizeof(NET_DVR_PICCFG_V30); int channelNum = i + ipcfg.dwStartDChan; NET_DVR_GetDVRConfig(lUserID, NET_DVR_GET_PICCFG_V30, channelNum, &channelInfo, sizeof(NET_DVR_PICCFG_V30), &bytesReturned); std::cout <<"通道号 "<< channelNum << "\t通道名称 " << channelInfo.sChanName; std::cout << "\t用户名 " << ipcfg.struIPDevInfo[i].sUserName << "\t密码 " << ipcfg.struIPDevInfo[i].sPassword; std::cout << "\t设备ID " << (int)ipcfg.struIPDevInfo[i].szDeviceID; std::cout << "\tip地址 " << ipcfg.struIPDevInfo[i].struIP.sIpV4 << "\t端口 " << ipcfg.struIPDevInfo[i].wDVRPort << std::endl; } //释放SDK资源 NET_DVR_Logout(lUserID); NET_DVR_Cleanup(); return 0; } The code was running ok, but when migrating to another machine, something went wrong.
Report the error: NET_DVR_GetDVRConfig failed Device does not support this function
Note the phrase:
If the number of IP channels supported by the device is greater than 0, then the remote parameter configuration interface NET_DVR_GetDVRConfig can be used.
This means that to use this function, you need to check the number of IP channels supported by the device first.
Also, the manual gives a sample program (check first, then call)
The sample procedure is as follows.
ps: there is a point I want to spit, the manual on the ET_DVR_GetDVRConfig function explanation, there is no mention of this issue, causing me to look for a long time to find here to write. Since this function is not supported by all devices, then the norm should be written to check first, then call.
#include #include #include "Windows.h" #include "string.h" #include "HCNetSDK.h" using namespace std; void main() { int i=0; BYTE byIPID,byIPIDHigh; int iDevInfoIndex, iGroupNO, iIPCh; DWORD dwReturned = 0; //--------------------------------------- // 初始化 NET_DVR_Init(); //设置连接时间与重连时间 NET_DVR_SetConnectTime(2000, 1); NET_DVR_SetReconnect(10000, true); //--------------------------------------- // 注册设备 LONG lUserID; //Login parameters, including device address, login user, password, etc. NET_DVR_USER_LOGIN_INFO struLoginInfo = {0}; struLoginInfo.bUseAsynLogin = 0; //同步登录方式 strcpy(struLoginInfo.sDeviceAddress, "192.0.0.64"); //设备IP地址 struLoginInfo.wPort = 8000; //设备服务端口 strcpy(struLoginInfo.sUserName, "admin"); //设备登录用户名 strcpy(struLoginInfo.sPassword, "abcd1234"); //设备登录密码 //设备信息, 输出参数 NET_DVR_DEVICEINFO_V40 struDeviceInfoV40 = {0}; lUserID = NET_DVR_Login_V40(&struLoginInfo, &struDeviceInfoV40); if (lUserID < 0) { printf("Login failed, error code: %d\n", NET_DVR_GetLastError()); NET_DVR_Cleanup(); return; } printf("The max number of analog channels: %d\n",struDeviceInfoV40.struDeviceV30.byChanNum); //模拟通道个数 printf("The max number of IP channels: %d\n", struDeviceInfoV40.struDeviceV30.byIPChanNum + struDeviceInfoV40.struDeviceV30.byHighDChanNum * 256);//IP通道个数 //获取IP通道参数信息 NET_DVR_IPPARACFG_V40 IPAccessCfgV40; memset(&IPAccessCfgV40, 0, sizeof(NET_DVR_IPPARACFG)); iGroupNO=0; if (! NET_DVR_GetDVRConfig(lUserID, NET_DVR_GET_IPPARACFG_V40, iGroupNO, &IPAccessCfgV40, sizeof(NET_DVR_IPPARACFG_V40), &dwReturned)) { printf("NET_DVR_GET_IPPARACFG_V40 error, %d\n", NET_DVR_GetLastError()); NET_DVR_Logout(lUserID); NET_DVR_Cleanup(); return; } else { for (i=0;i<IPAccessCfgV40.dwDChanNum;i++) { switch(IPAccessCfgV40.struStreamMode[i].byGetStreamType) { case 0: //直接从设备取流 if (IPAccessCfgV40.struStreamMode[i].uGetStream.struChanInfo.byEnable) { byIPID=IPAccessCfgV40.struStreamMode[i].uGetStream.struChanInfo.byIPID; byIPIDHigh=IPAccessCfgV40.struStreamMode[i].uGetStream.struChanInfo.byIPIDHigh; iDevInfoIndex=byIPIDHigh*256 + byIPID-1-iGroupNO*64; printf("IP channel no.%d is online, IP: %s\n", i+1, IPAccessCfgV40.struIPDevInfo[iDevInfoIndex].struIP.sIpV4); } break; case 1: //从流媒体取流 if (IPAccessCfgV40.struStreamMode[i].uGetStream.struPUStream.struStreamMediaSvrCfg.byValid) { printf("IP channel %d connected with the IP device by stream server.\n", i+1); printf("IP of stream server: %s, IP of IP device: %s\n",IPAccessCfgV40.struStreamMode[i].uGetStream.\ struPUStream.struStreamMediaSvrCfg.struDevIP.sIpV4, IPAccessCfgV40.struStreamMode[i].uGetStream.\ struPUStream.struDevChanInfo.struIP.sIpV4); } break; default: break; } } } //配置IP通道5; iIPCh=4; //支持自定义协议 NET_DVR_CUSTOM_PROTOCAL struCustomPro; if (! NET_DVR_GetDVRConfig(lUserID, NET_DVR_GET_CUSTOM_PRO_CFG, 1, &struCustomPro, sizeof(NET_DVR_CUSTOM_PROTOCAL), &dwReturned)) //获取自定义协议1 { printf("NET_DVR_GET_CUSTOM_PRO_CFG error, %d\n", NET_DVR_GetLastError()); NET_DVR_Logout(lUserID); NET_DVR_Cleanup(); return; } struCustomPro.dwEnabled=1; //启用主码流 struCustomPro.dwEnableSubStream=1; //启用子码流 strcpy((char *)struCustomPro.sProtocalName,"Protocal_RTSP"); //自定义协议名称:Protocal_RTSP,最大16字节 struCustomPro.byMainProType=1; //主码流协议类型: 1- RTSP struCustomPro.byMainTransType=2; //主码流传输协议: 0-Auto, 1-udp, 2-rtp over rtsp struCustomPro.wMainPort=554; //主码流取流端口 strcpy((char *)struCustomPro.sMainPath,"rtsp://192.168.1.65/h264/ch1/main/av_stream");//主码流取流URL struCustomPro.bySubProType=1; //子码流协议类型: 1-RTSP struCustomPro.bySubTransType=2; //子码流传输协议: 0-Auto, 1-udp, 2-rtp over rtsp struCustomPro.wSubPort=554; //子码流取流端口 strcpy((char *)struCustomPro.sSubPath,"rtsp://192.168.1.65/h264/ch1/sub/av_stream");//子码流取流URL if (! NET_DVR_SetDVRConfig(lUserID, NET_DVR_SET_CUSTOM_PRO_CFG, 1, &struCustomPro, sizeof(NET_DVR_CUSTOM_PROTOCAL))) //设置自定义协议1 { printf("NET_DVR_SET_CUSTOM_PRO_CFG error, %d\n", NET_DVR_GetLastError()); NET_DVR_Logout(lUserID); NET_DVR_Cleanup(); return; } printf("Set the custom protocol: %s\n", "Protocal_RTSP"); NET_DVR_IPC_PROTO_LIST m_struProtoList; if (! NET_DVR_GetIPCProtoList(lUserID, &m_struProtoList)) //Get the front-end protocols supported by the device { printf("NET_DVR_GetIPCProtoList error, %d\n", NET_DVR_GetLastError()); NET_DVR_Logout(lUserID); NET_DVR_Cleanup(); return; } IPAccessCfgV40.struIPDevInfo[iIPCh].byEnable=1; //启用 for (i = 0; i<m_struProtoList.dwProtoNum; i++) { if(strcmp((char *)struCustomPro.sProtocalName,(char *)m_struProtoList.struProto[i].byDescribe)==0) { IPAccessCfgV40.struIPDevInfo[iIPCh].byProType=m_struProtoList.struProto[i].dwType; //选择自定义协议 break; } } //IPAccessCfgV40.struIPDevInfo[iIPCh].byProType=0; //厂家私有协议 strcpy((char *)IPAccessCfgV40.struIPDevInfo[iIPCh].struIP.sIpV4,"192.168.1.65"); //前端IP设备的IP地址 IPAccessCfgV40.struIPDevInfo[iIPCh].wDVRPort=8000; //前端IP设备服务端口 strcpy((char *)IPAccessCfgV40.struIPDevInfo[iIPCh].sUserName,"admin"); //前端IP设备登录用户名 strcpy((char *)IPAccessCfgV40.struIPDevInfo[iIPCh].sPassword,"12345"); //前端IP设备登录密码 IPAccessCfgV40.struStreamMode[iIPCh].byGetStreamType=0; IPAccessCfgV40.struStreamMode[iIPCh].uGetStream.struChanInfo.byChannel=1; IPAccessCfgV40.struStreamMode[iIPCh].uGetStream.struChanInfo.byIPID=(iIPCh+1)%256; IPAccessCfgV40.struStreamMode[iIPCh].uGetStream.struChanInfo.byIPIDHigh=(iIPCh+1)/256; //IP通道配置,包括添加、删除、修改IP通道等 if (! NET_DVR_SetDVRConfig(lUserID, NET_DVR_SET_IPPARACFG_V40, iGroupNO, &IPAccessCfgV40, sizeof(NET_DVR_IPPARACFG_V40))) { printf("NET_DVR_SET_IPPARACFG_V40 error, %d\n", NET_DVR_GetLastError()); NET_DVR_Logout(lUserID); NET_DVR_Cleanup(); return; } else { printf("Set IP channel no.%d, IP: %s\n", iIPCh+1, IPAccessCfgV40.struIPDevInfo[iIPCh].struIP.sIpV4); } //注销用户 NET_DVR_Logout(lUserID); //释放SDK资源 NET_DVR_Cleanup(); return; } 

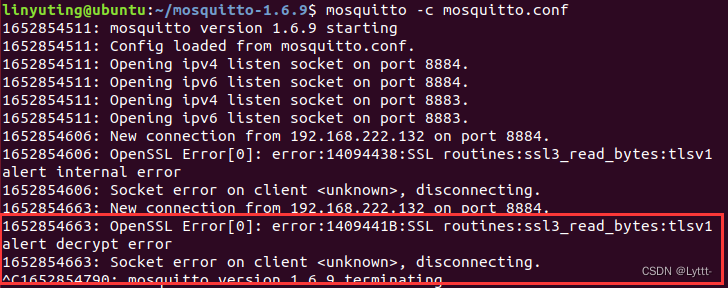

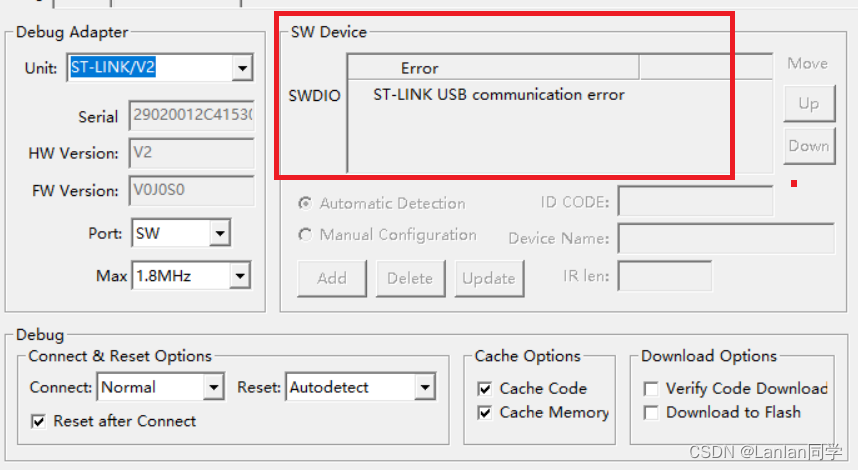

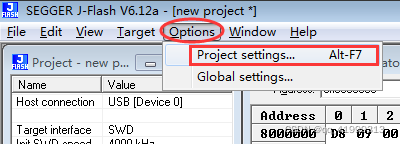
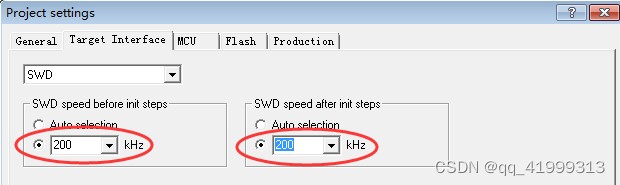
 Problem: the download speed is too fast, or the download line is too long, resulting in signal attenuation.
Problem: the download speed is too fast, or the download line is too long, resulting in signal attenuation.