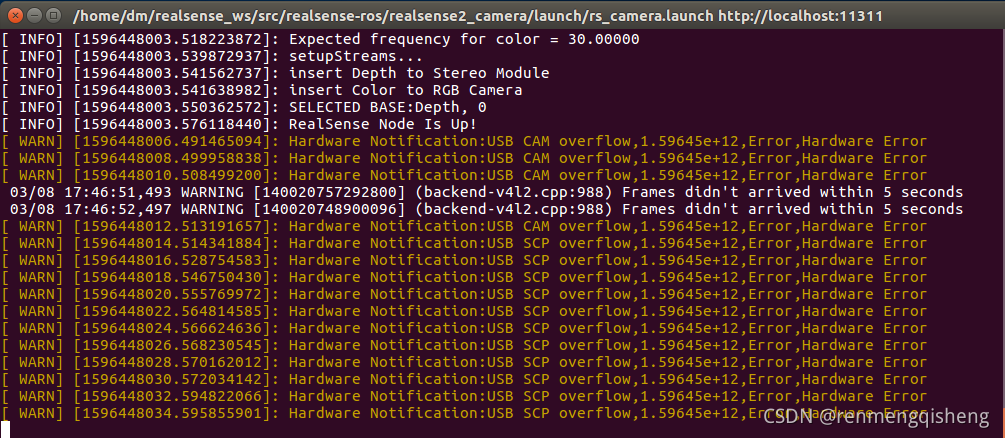
Run the command roslaunch realsense2_ camera rs_ The following error message appears in camera.launch:
resolvent:
The reason for this problem is not that the driver is not installed properly, but because the realsense is connected to the computer through the USB2.0 interface, the transmission speed is slow, resulting in data overflow and loss. The problem can be solved by connecting through USB3.0.
Read More:
- The C language qsort() function reports an error for overflow of – 2147483648 and 2147483648
- ROS package ROS_ astra_ Camera cannot open RGB lens
- failed to open usb interface: 0, error: RS2_USB_STATUS_ACCESS
- Running Django (2.2) project in Python 3.7.9 reports an error
- Solution to the problem that the camera can’t display when ROS running
- Qxcbcconnection: xcb error: 148 error while ROS is running rviz
- Out of memory overflow solution for idea running error
- Virtualbox failed to attach usb, VERR_PDM_NO_USB_PORTS problem solved
- Mmdetection reports an error when running its own coco dataset. Does not match the length of \ ` classes \ ` 80) in cocodataset
- ROS problem: vidioc_ S_ FMT error 16, Device or resource busy
- Hadoop reports an error. Cannot access scala.serializable and python MapReduce reports an error
- The echots in Vue reports an error. After obtaining the DOM element, the chart can be displayed. The console still reports an error
- HTML method IE8 reports an error, IE8 jQuery Ajax obtains static resources reports an error, typeerror denies access
- The file server reports an error of 413, and the file uploaded by nginx reports an error of 413 request entity too large
- Lamdba in the studio part reports an error. Observe lamdba reports an error but can run
- QT + MySQL generates an EXE file and reports an error “driver not loaded”. Solution steps
- Ubuntu cannot access USB device, failed to create a proxy device for the USB device
- After NPM run dev is running, the browser does not respond and reports an error in. / ~ / Babel loader / lib! / ~ / Vue loader / lib/ selector.js?type=script&in
- ROS cannot download ROS melody joint state publisher GUI reference
- When installing ROS: bash / opt / ROS / kinetic/ setup.bash : there is no file or directory