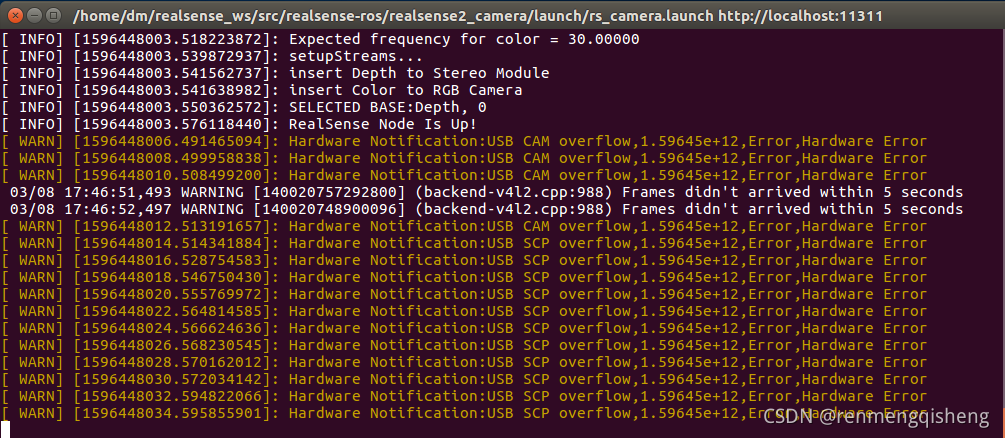
Run the command roslaunch realsense2_ camera rs_ The following error message appears in camera.launch:
resolvent:
The reason for this problem is not that the driver is not installed properly, but because the realsense is connected to the computer through the USB2.0 interface, the transmission speed is slow, resulting in data overflow and loss. The problem can be solved by connecting through USB3.0.