ROS generate_ messages_ Solution of CPP compilation error
Learning the knowledge of C + + and python joint programming under ROS, there is an error report when compiling cpp file, the following process is recorded:
-
in the reference → Article 1 ← for configuration, the insertion of CPP and py has been completed, and
catkin is performed_ There are errors in the make
-
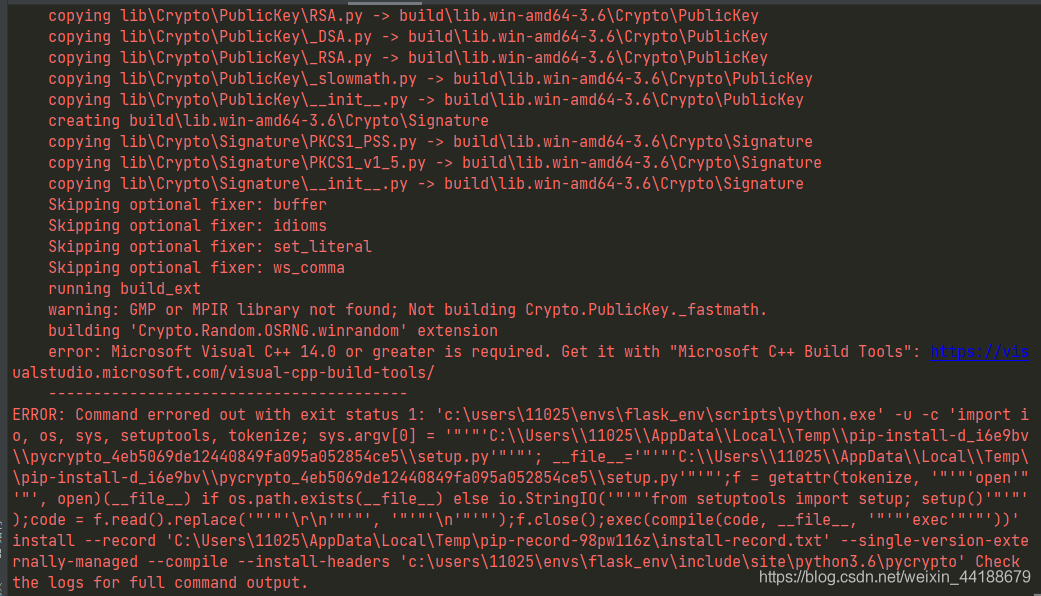
steps, and the error contents are as follows:
CMake Error at my_pkg/CMakeLists.txt:27 (add_dependencies):
The dependency target "my_pkg_generate_messages_cpp" of target "listener"
does not exist.
The cmake version is adjusted according to Article 2 ←, and no error is reported. The principle is that cmake before 3.0 will turn this error report into a warning, and it has passed the compilation, but in actual use, it is still unable to find the listener program built from CPP. Finally, the cmakelists is adjusted according to Article 3 ←,
– first of all, Add the following code block:
catkin_package(
INCLUDE_DIRS include
# LIBRARIES strands_gazing
CATKIN_DEPENDS std_msgs
# DEPENDS system_lib
)
After that, in Add_ Added ${catkin> to dependencies _ EXPORTED_ Targets} finally, when compiling, execute catkin first_ make --pkg my_ PKG (here is the PKG name) , and then execute catkin_ Make problem solving
Finally, the revised cmakelists :
cmake_minimum_required(VERSION 3.0.2)
project(my_pkg)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
)
catkin_package(
INCLUDE_DIRS include
# LIBRARIES strands_gazing
CATKIN_DEPENDS std_msgs
# DEPENDS system_lib
)
include_directories(include/my_pkg ${catkin_INCLUDE_DIRS})
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener my_pkg_generate_messages_cpp ${catkin_EXPORTED_TARGETS})