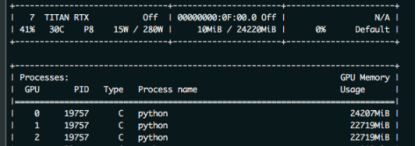
this paper mainly solves the problem that zero card of pytorch GPU occupies more video memory than other CARDS during model training. As shown in the figure below: the native GPU card is TITAN RTX, video memory is 24220M, batch_size = 9, and three CARDS are used. The 0th card video memory occupies 24207M. At this time, it just starts to run, and only a small amount of data is transferred to the video card. If the data is in multiple points, the video memory of the 0 card must burst. The reason why 0 card has higher video memory: During the back propagation of the network, the calculated gradient of loss is calculated on 0 card by default. So will be more than other graphics card some video memory, how much more specific, mainly to see the structure of the network.
as a result, in order to prevent training was interrupted due to out of memory. The foolhardy option is to set batch_size to 6, or 2 pieces of data per card.
batch_size = 6, the other the same, as shown in the figure below
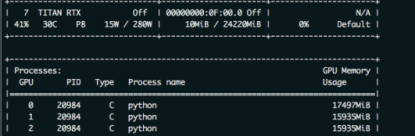
have found the problem?Video memory USES only 1,2 CARDS and less than 16 gigabytes of memory. The batch_size is sacrificed because the 0 card might exceed a little bit of video memory.
so there’s no more elegant way?The answer is yes. That is borrowed from the transformer – xl BalancedDataParallel used in the class. The code is as follows (source) :
import torch
from torch.nn.parallel.data_parallel import DataParallel
from torch.nn.parallel.parallel_apply import parallel_apply
from torch.nn.parallel._functions import Scatter
def scatter(inputs, target_gpus, chunk_sizes, dim=0):
r"""
Slices tensors into approximately equal chunks and
distributes them across given GPUs. Duplicates
references to objects that are not tensors.
"""
def scatter_map(obj):
if isinstance(obj, torch.Tensor):
try:
return Scatter.apply(target_gpus, chunk_sizes, dim, obj)
except Exception:
print('obj', obj.size())
print('dim', dim)
print('chunk_sizes', chunk_sizes)
quit()
if isinstance(obj, tuple) and len(obj) > 0:
return list(zip(*map(scatter_map, obj)))
if isinstance(obj, list) and len(obj) > 0:
return list(map(list, zip(*map(scatter_map, obj))))
if isinstance(obj, dict) and len(obj) > 0:
return list(map(type(obj), zip(*map(scatter_map, obj.items()))))
return [obj for targets in target_gpus]
# After scatter_map is called, a scatter_map cell will exist. This cell
# has a reference to the actual function scatter_map, which has references
# to a closure that has a reference to the scatter_map cell (because the
# fn is recursive). To avoid this reference cycle, we set the function to
# None, clearing the cell
try:
return scatter_map(inputs)
finally:
scatter_map = None
def scatter_kwargs(inputs, kwargs, target_gpus, chunk_sizes, dim=0):
"""Scatter with support for kwargs dictionary"""
inputs = scatter(inputs, target_gpus, chunk_sizes, dim) if inputs else []
kwargs = scatter(kwargs, target_gpus, chunk_sizes, dim) if kwargs else []
if len(inputs) < len(kwargs):
inputs.extend([() for _ in range(len(kwargs) - len(inputs))])
elif len(kwargs) < len(inputs):
kwargs.extend([{} for _ in range(len(inputs) - len(kwargs))])
inputs = tuple(inputs)
kwargs = tuple(kwargs)
return inputs, kwargs
class BalancedDataParallel(DataParallel):
def __init__(self, gpu0_bsz, *args, **kwargs):
self.gpu0_bsz = gpu0_bsz
super().__init__(*args, **kwargs)
def forward(self, *inputs, **kwargs):
if not self.device_ids:
return self.module(*inputs, **kwargs)
if self.gpu0_bsz == 0:
device_ids = self.device_ids[1:]
else:
device_ids = self.device_ids
inputs, kwargs = self.scatter(inputs, kwargs, device_ids)
if len(self.device_ids) == 1:
return self.module(*inputs[0], **kwargs[0])
replicas = self.replicate(self.module, self.device_ids)
if self.gpu0_bsz == 0:
replicas = replicas[1:]
outputs = self.parallel_apply(replicas, device_ids, inputs, kwargs)
return self.gather(outputs, self.output_device)
def parallel_apply(self, replicas, device_ids, inputs, kwargs):
return parallel_apply(replicas, inputs, kwargs, device_ids)
def scatter(self, inputs, kwargs, device_ids):
bsz = inputs[0].size(self.dim)
num_dev = len(self.device_ids)
gpu0_bsz = self.gpu0_bsz
bsz_unit = (bsz - gpu0_bsz) // (num_dev - 1)
if gpu0_bsz < bsz_unit:
chunk_sizes = [gpu0_bsz] + [bsz_unit] * (num_dev - 1)
delta = bsz - sum(chunk_sizes)
for i in range(delta):
chunk_sizes[i + 1] += 1
if gpu0_bsz == 0:
chunk_sizes = chunk_sizes[1:]
else:
return super().scatter(inputs, kwargs, device_ids)
return scatter_kwargs(inputs, kwargs, device_ids, chunk_sizes, dim=self.dim)
you can see, in the code BalancedDataParallel inherited the torch. The nn. DataParallel, through the custom after 0, the size of the card batch_size gpu0_bsz, namely 0 card a bit less data. Balance the memory usage of 0 CARDS with other CARDS. The invocation code is as follows:
import BalancedDataParallel
if n_gpu > 1:
model = BalancedDataParallel(gpu0_bsz=2, model, dim=0).to(device)
# model = torch.nn.DataParallel(model)
gpu0_bsz: 0 card batch_size of GPU;
model: model;
dim: batch dimension
as a result, we might as well just batch_size set to 8, namely gpu0_bsz = 2 try, the results are as follows:
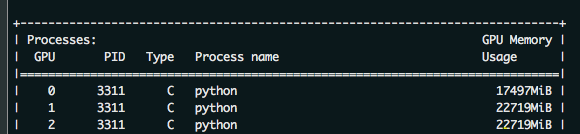
the batch_size from 6 to 8 of success, because 0 put a batch less, therefore, will be smaller than the other CARDS. But sacrificing the video memory of one card to the video memory of others, eventually increasing the batch_size, is still available. The advantages of this method are even more obvious when the number of CARDS is large.
Read More:
- Runtimeerror using Python training model: CUDA out of memory error resolution
- How to empty a whole line in latex (simple and effective)
- Solve the problem that the version of less is too high
- [error record] as compilation error (Android support plugin version is too high | upgrade Android studio to the latest version)
- Error analysis of multiple linear regression in R language model.frame.default
- Solution summary of VMware network card without IP and failure to start network card (continuous update)
- TypeError(‘Keyword argument not understood:‘, ‘***‘) in keras.models load_model
- Python conversion hex to string, high and low data processing
- An import error is reported in the python. The solution to setting. Pylintrc is invalid
- Python error: importerror: DLL load failed: unable to find the specified module solution
- After the new video card rtx3060 arrives, configure tensorflow and run “TF. Test. Is”_ gpu_ The solution of “available ()” output false
- When using CSS to write the registration page, we found that the editing effect is not effective
- Error: importerror: DLL load failed: the page file is too small to complete the operation.
- Nginx reports 502 error, log connect() failed (111: Connection refused) while connecting to upstream. A personal effective solution
- Python data cleaning — delete failed images__ Simple version
- Visualization of training process based on tensorboard on Python
- Simple Python crawler exercise: News crawling on sohu.com
- When using Win32DiskImager to read and write SD card, error 1117 is reported
- The solution of the error code is 2503 in Python installation
- Keras saves save() and save in the model_ weights()