Resolution of problems with rviz global status displayed as error
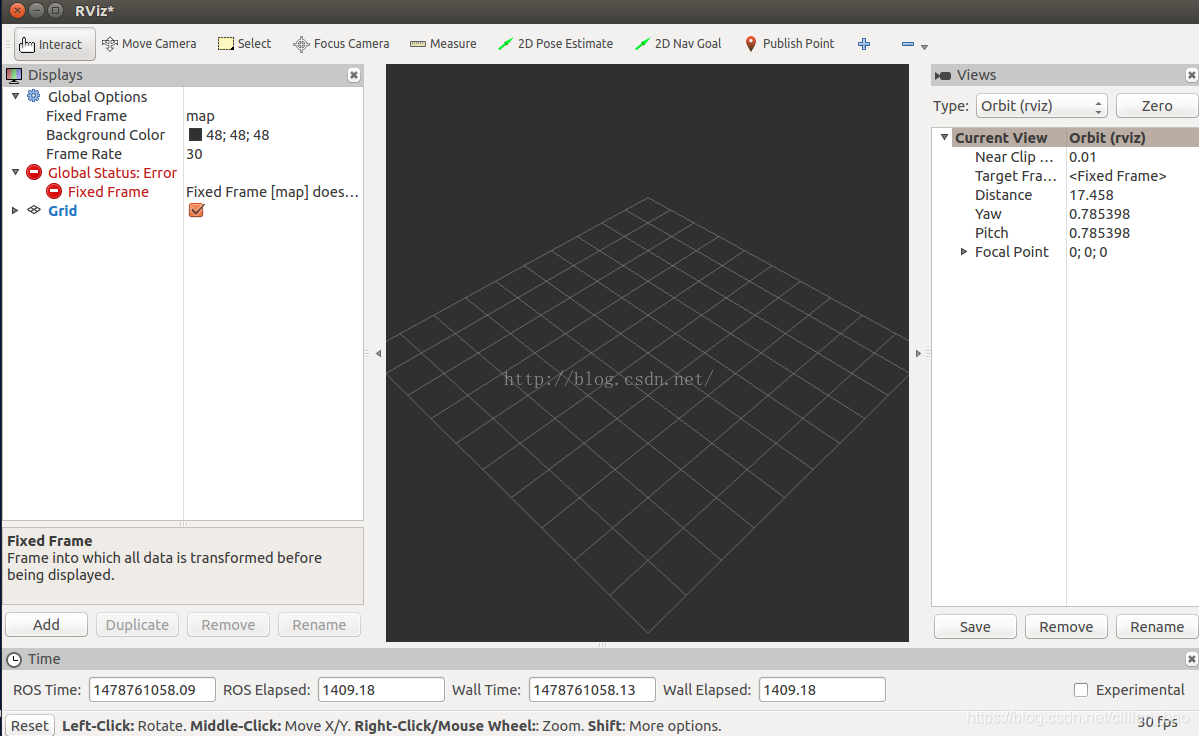
Run the program rosrun rviz rviz – D in the official tutorial of ROS
rospack find turtle_ tf/rviz/turtle_ rviz.rviz
No coordinates are displayed for the results found
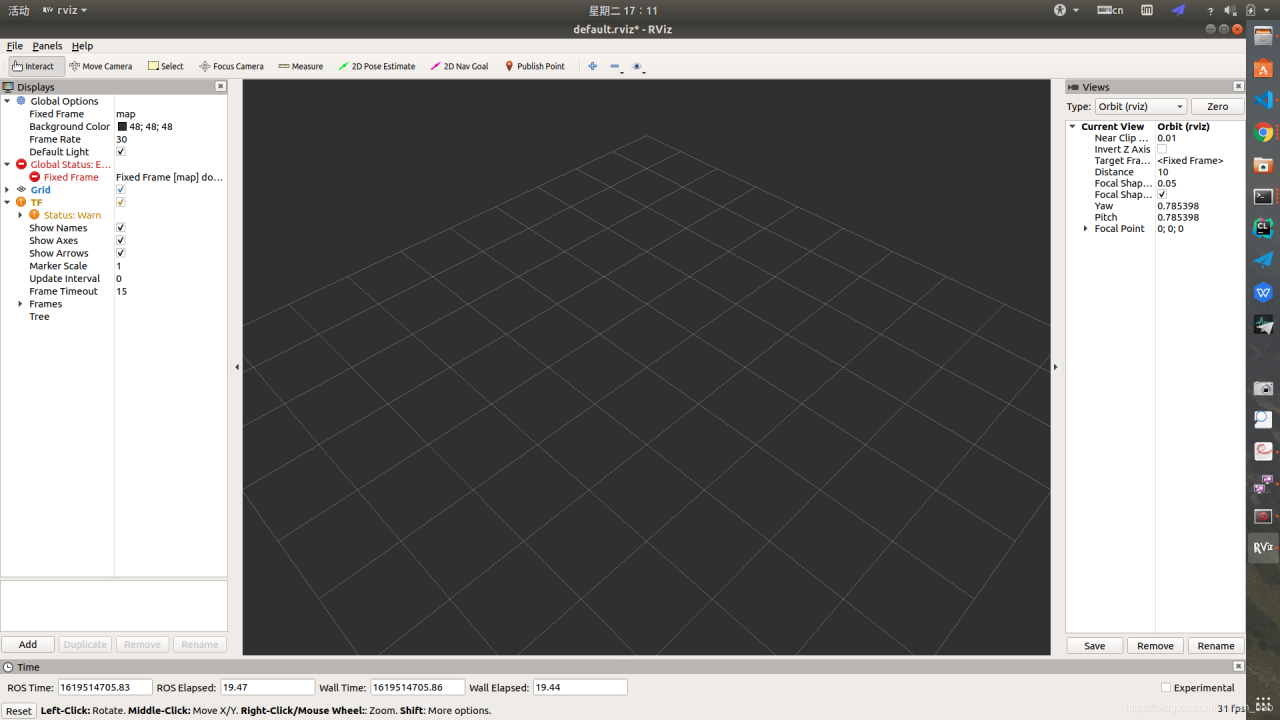
Later, I run rosrun rviz when I write TF transformation, and find that the status of TF is warning when add joins TF
In fact, first of all, change the map on the left side of the fixed frame under global options in the upper left corner to world, and then the global status will become OK.
Then select add in the lower left corner to add a TF display. So you can see that there are three coordinates in the middle three-dimensional diagram. Two of them are the coordinates of the two turtles, and the one in the middle is the world coordinates. Next, move the tortoise, and the two coordinates will follow.
Understand the nature of the displays on the left in rviz. In fact, those things are the same as a model. When a tortoise is represented by a coordinate system, the coordinate system will change accordingly. How do you know about this change?In frame, it will receive the corresponding message and then make corresponding actions according to the message.
The exact reason is still unknown
Read More:
- Rviz global status is displayed as the problem resolution of error
- Solution to the problem that some special characters in finereport cannot be displayed or displayed as question mark
- Python global variables and global keywords
- After Java application is deployed in Linux environment, Chinese is displayed as square solution
- ||Error: LD returned 1 exit status | C + + compile time problems
- Resolve zuul the HTTP status 500 – internal server error error error displayed after startup
- Error: global variable is ambiguous (conflict between using namespace STD and global variable)
- cl.exe Error resolution of ‘failed with exit status 2
- Qxcbcconnection: xcb error: 148 error while ROS is running rviz
- Error c2951: template declaration can only be used at the global, namespace, or class scope. Error c2598: link specification must be at the global scope
- Node configuration environment variable and global installation of webapck
- The Vue project is packaged and deployed to tomcat, and an Error 404 is reported as soon as it is refreshed
- OpenGL configuration file, as well as unable to parse the file solution
- AWS appasync error global.TYPE.xx
- Vue element admin configure global styles
- The problem that the El icons icon cannot be displayed in vue3 + element plus + vite
- After changing tomcat, the previous images cannot be displayed. All 404,
- It will appear as soon as it is turned on BTServer.exe -Application error (0xc0150002)
- The time of the time database displayed by the front end is inconsistent
- ASP.NET Parser Error Message: Could not load type ‘Web.Global’.