Resolution of problems with rviz global status displayed as error
Run the program rosrun rviz rviz – D in the official tutorial of ROS
rospack find turtle_ tf/rviz/turtle_ rviz.rviz
No coordinates are displayed for the results found
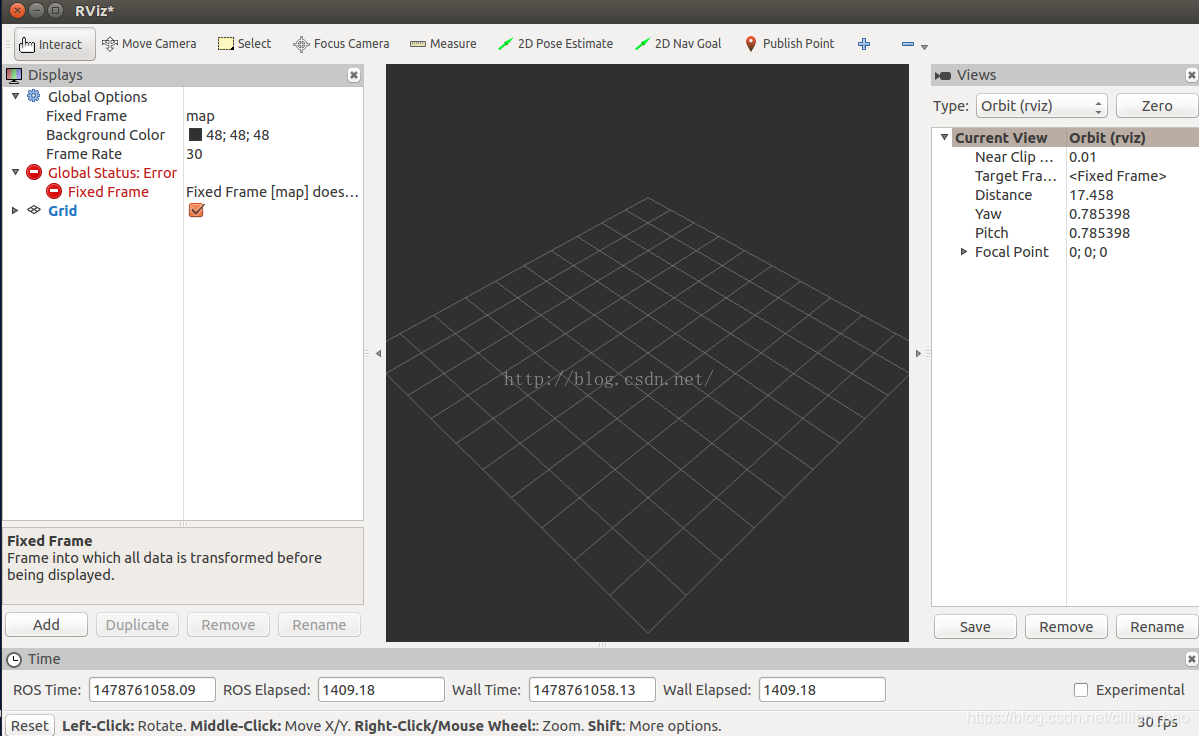
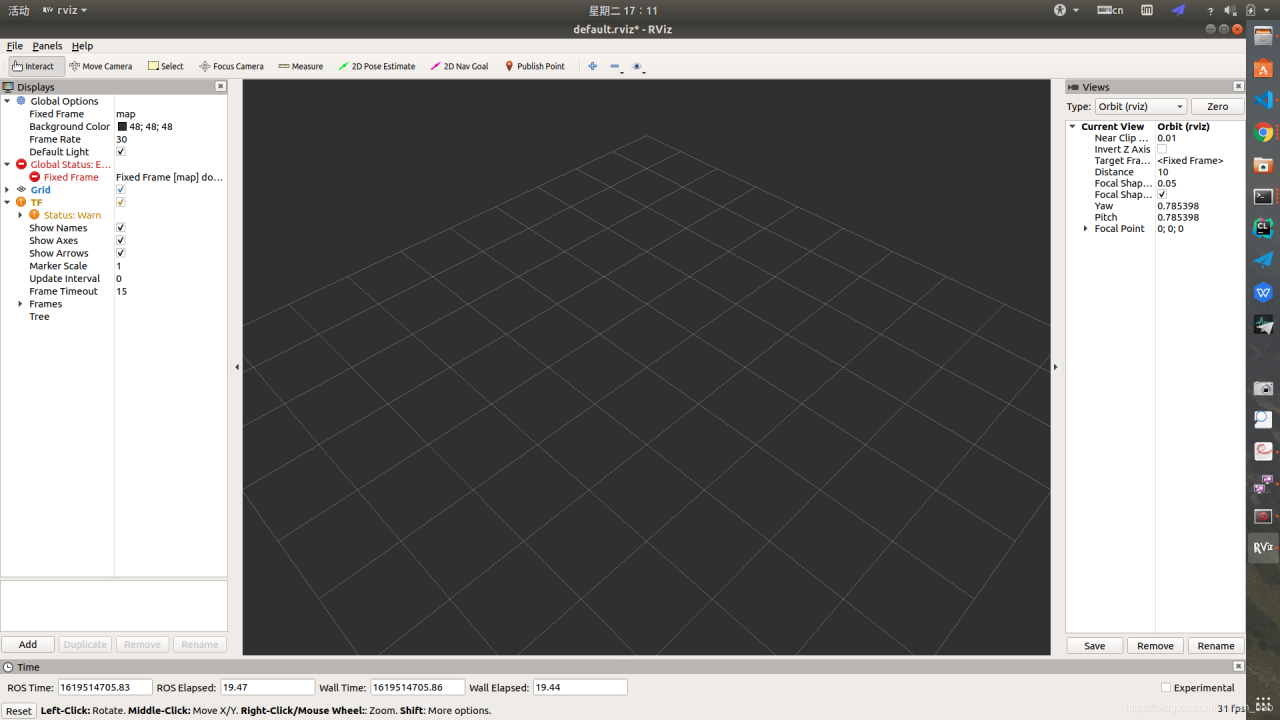
Later, I run rosrun rviz when I write TF transformation, and find that the status of TF is warning when add joins TF
In fact, first of all, change the map on the left side of the fixed frame under global options in the upper left corner to world, and then the global status will become OK.
Then select add in the lower left corner to add a TF display. So you can see that there are three coordinates in the middle three-dimensional diagram. Two of them are the coordinates of the two turtles, and the one in the middle is the world coordinates. Next, move the tortoise, and the two coordinates will follow.
Understand the nature of the displays on the left in rviz. In fact, those things are the same as a model. When a tortoise is represented by a coordinate system, the coordinate system will change accordingly. How do you know about this change?In frame, it will receive the corresponding message and then make corresponding actions according to the message.
The exact reason is still unknown