Vue reports error: request aborted at createerror
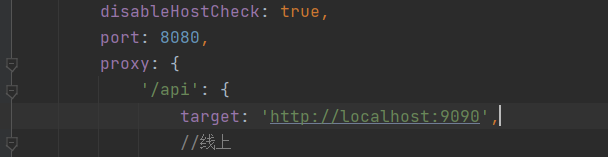
The address cannot be localhost, or the interface cannot be requested. Replace it with IP

Vue reports error: request aborted at createerror
The address cannot be localhost, or the interface cannot be requested. Replace it with IP
Today, I encountered a speechless mistake and tossed it for a long time… I mentioned the feature network with Bert, but it didn’t work… I checked the size and found that it wasn’t, and later found that it wasn’t on CUDA
Specific error reporting
RuntimeError: Caught RuntimeError in replica 0 on device 0.
RuntimeError: CUDA error: CUBLAS_ STATUS_ ALLOC_ FAILED when calling `cublasCreate(handle)
resolvent:
ext_hashCodes.unsqueeze(1).repeat(1, B, 1)
#change to
ext_hashCodes.unsqueeze(1).repeat(1, B, 1).cuda()
#It's OK
After learning the fourth lesson of Mr. Gu Yue’s ROS, I started the keyboard control of the robot and reported this error in the launch file. The following is the error content:
process[mbot_teleop-1]: started with pid [4942]
File "/home/zxf/catkin_ws/src/mbot_teleop/scripts/mbot_teleop.py", line 78
print msg
^
SyntaxError: Missing parentheses in call to 'print'. Did you mean print(msg)?
[mbot_teleop-1] process has died [pid 4942, exit code 1, cmd /home/zxf/catkin_ws/src/mbot_teleop/scripts/mbot_teleop.py __name:=mbot_teleop __log:=/home/zxf/.ros/log/4e9341ca-0155-11ec-8ec5-cf95496c0738/mbot_teleop-1.log].
log file: /home/zxf/.ros/log/4e9341ca-0155-11ec-8ec5-cf95496c0738/mbot_teleop-1*.log
I searched the Internet and found that it was because of the version of python2. X was incompatible with the version of python3. X. The reason for the error lies in the print output syntax. A simple example is hello ROS
python2.x
print "hello ROS"
Output: hello ROS
print 'hello ROS'
Output: hello ROS
print ('hello ROS')
Output: hello ROS
print ("hello ROS")
Output: hello ROSThe above four methods can be applied in Python 2. X, but not necessarily in Python 3. X
python3.x
print("hello ROS")
Output: hello ROS
print(hello ROS)
Output: hello ROSI use Ubuntu 20.04, so it is the Python 3 version, which is different from that used by Gu Yue, so I need to modify ~/catkin_ws/src/mbot_teleop/scripts/mbot_ Teleop.py file
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from geometry_msgs.msg import Twist
import sys, select, termios, tty
msg = """
Control mbot!
---------------------------
Moving around:
u i o
j k l
m , .
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
space key, k : force stop
anything else : stop smoothly
CTRL-C to quit
"""
moveBindings = {
'i':(1,0),
'o':(1,-1),
'j':(0,1),
'l':(0,-1),
'u':(1,1),
',':(-1,0),
'.':(-1,1),
'm':(-1,-1),
}
speedBindings={
'q':(1.1,1.1),
'z':(.9,.9),
'w':(1.1,1),
'x':(.9,1),
'e':(1,1.1),
'c':(1,.9),
}
def getKey():
tty.setraw(sys.stdin.fileno())
rlist, _, _ = select.select([sys.stdin], [], [], 0.1)
if rlist:
key = sys.stdin.read(1)
else:
key = ''
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
return key
speed = .2
turn = 1
def vels(speed,turn):
return "currently:\tspeed %s\tturn %s " % (speed,turn)
if __name__=="__main__":
settings = termios.tcgetattr(sys.stdin)
rospy.init_node('mbot_teleop')
pub = rospy.Publisher('/cmd_vel', Twist, queue_size=5)
x = 0
th = 0
status = 0
count = 0
acc = 0.1
target_speed = 0
target_turn = 0
control_speed = 0
control_turn = 0
try:
print(msg)
print(vels(speed,turn))
while(1):
key = getKey()
if key in moveBindings.keys():
x = moveBindings[key][0]
th = moveBindings[key][1]
count = 0
elif key in speedBindings.keys():
speed = speed * speedBindings[key][0]
turn = turn * speedBindings[key][1]
count = 0
print(vels(speed,turn))
if (status == 14):
print(msg)
status = (status + 1) % 15
elif key == ' ' or key == 'k' :
x = 0
th = 0
control_speed = 0
control_turn = 0
else:
count = count + 1
if count > 4:
x = 0
th = 0
if (key == '\x03'):
break
target_speed = speed * x
target_turn = turn * th
if target_speed > control_speed:
control_speed = min( target_speed, control_speed + 0.02 )
elif target_speed < control_speed:
control_speed = max( target_speed, control_speed - 0.02 )
else:
control_speed = target_speed
if target_turn > control_turn:
control_turn = min( target_turn, control_turn + 0.1 )
elif target_turn < control_turn:
control_turn = max( target_turn, control_turn - 0.1 )
else:
control_turn = target_turn
twist = Twist()
twist.linear.x = control_speed;
twist.linear.y = 0;
twist.linear.z = 0
twist.angular.x = 0;
twist.angular.y = 0;
twist.angular.z = control_turn
pub.publish(twist)
except:
print(e)
finally:
twist = Twist()
twist.linear.x = 0; twist.linear.y = 0; twist.linear.z = 0
twist.angular.x = 0; twist.angular.y = 0; twist.angular.z = 0
pub.publish(twist)
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)It is probably to add () to the print output statement on lines 78, 79, 93, 95 and 141.
About network programming, the server-client bind error: address already in use:
reason:
1. You used the port number, but the process did not exist.
2. At the end of the process:
crtl +c And crtl + Z are different. The former ends the process and the latter suspends the process
If you use the latter, the process will hang and not be killed
Solution:
1. Kill the process
PS – Aue view PID , Then kill + process PID and kill the process
2. Change the port number
3. Wait half a minute until the port is released
4. External parameter transmission
It is more convenient to directly change the new port number than 2
5. Use the setsockopt() function to cancel the port number binding restriction
int on=1;
setsockopt(fd,SOL_ SOCKET,SO_ REUSEADDR,& on,sizeof(on));
mkdir ~/.git-rectify (. stands for hidden)
cd ~/git-rectify
libcurl4-gnutls-dev to libcurl4-openssl-dev
Problem description
RuntimeError: Error(s) in loading state_dict for FasterRCNN:Missing key(s) in state_dict: “backbone.body.conv1.weight”, “backbone.body.bn1.weight”, …
Solution:
# model.load_state_dict(torch.load("./model.pth"))
model.load_state_dict(torch.load("./model.pth"), False)
Source code analysis
load_state_dict(state_dict, strict=True)[SOURCE]
Copies parameters and buffers from state_dict into this module and its descendants. If strict is True, then the keys of state_dict must exactly match the keys returned by this module’s state_dict() function.
Parameters
state_dict (dict) – a dict containing parameters and persistent buffers.
strict (bool, optional) – whether to strictly enforce that the keys in state_dict match the keys returned by this module’s state_dict() function. Default: True
Returns
missing_keys is a list of str containing the missing keys
unexpected_keys is a list of str containing the unexpected keys
Return type
NamedTuple with missing_keys and unexpected_keys fieldsSyntax Error:
Enabled
old
The following means: pathex=[‘F:\wk\hangye\oracletab’],
& & & & & & & & & & & & & & & & binaries=[],
& & & & & & & & & & & xls=[(‘F:\wk\hangye\oracletab\\sql’,’sql’),(‘F:\wk\hangye\oracletab\\xls’,’xls’),(‘F:\wk\hangye\oracletab\\temp’,’temp’),(‘F:\wk\hangye\oracletab\\xls’,’xls’),(‘),(‘F:\wk\hangye\oracletab\\shell’,’shell’),(‘F:\wk\hangye\oracletab\\instantclient_11_2′,’.’), (‘F:\wk\hangye\oracletab\\moban’,’.’)],
➣ ➣ mports=[],
_Attributes
pathex=[‘F:\\wk\\hangye\\xinyibaotab’],
binaries=[],
datas=[(‘F:\\wk\hangye\\xinyibaotab\\sql’,’sql’),(‘F:\\wk\\hangye\\xinyibaotab\\xls’,’xls’),(‘F:\\wk\\hangye\\xinyibaotab\\temp’,’temp’),(‘F:\\wk\\hangye\\xinyibaotab\\shell’,’shell’),(‘F:\\wk\\hangye\\xinyibaotab\\moban’,’.’)],
hydrodenimports=[],
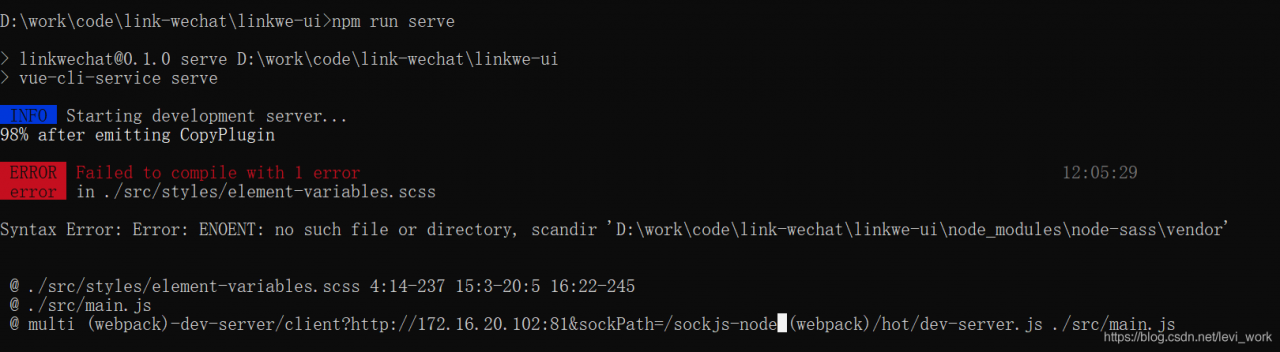
When installing node sass using NPM, the following errors may appear:
syntax error: error: enoent: no such file or directory, scanner’d: \ work \ ‘
the solution is to perform the following methods:
NPM rebuild node sass
Gazebo error – [rest. CC: 205] error in rest request
summarize some problems encountered in today’s running navigation
this error message appears. Gazebo error – [rest. CC: 205] error in rest request is probably due to the problem in the following file
~ /. Ignition/fuel/config.yaml
put the
URL: https://api.ignitionfuel.org Use URL: https://api.ignitionrobotics.org replace ~ /. Ignition/fuel/config.yaml file.
After changing this file, there may be errors, but it will not affect the use
the reason is that we just changed the above file
for the problem we want to solve, we can refer to the following scheme
error code
[Err] [ClientConfig.cc:270] Parser error [4]
Ignore the error, as it doesn’t affect functionality.
Delete the configuration file ~/.ignition/fuel/config.yaml, which may be broken. The next time you launch Gazebo a new file should be created.
PS C:\Users\wangting\Desktop\Wisdom_admin\wisdom_admin> npm run dev
> [email protected] dev C:\Users\wangting\Desktop\Wisdom_admin\wisdom_admin
> vue-cli-service serve
internal/modules/cjs/loader.js:985
throw err;
^
Error: Cannot find module 'semver'
Require stack:
- C:\Users\wangting\Desktop\Wisdom_admin\wisdom_admin\node_modules\_@[email protected]@@vue\cli-service\bin\vue-cli-service.js
at Function.Module._resolveFilename (internal/modules/cjs/loader.js:982:15)
at Function.Module._load (internal/modules/cjs/loader.js:864:27)
at Module.require (internal/modules/cjs/loader.js:1044:19)
at require (internal/modules/cjs/helpers.js:77:18)
at Object.<anonymous> (C:\Users\wangting\Desktop\Wisdom_admin\wisdom_admin\node_modules\_@[email protected]@@vue\cli-service\bin\vue-cli-service.js:3:16)
at Module._compile (internal/modules/cjs/loader.js:1158:30)
at Object.Module._extensions..js (internal/modules/cjs/loader.js:1178:10)
at Module.load (internal/modules/cjs/loader.js:1002:32)
at Function.Module._load (internal/modules/cjs/loader.js:901:14)
at Function.executeUserEntryPoint [as runMain] (internal/modules/run_main.js:74:12) {
code: 'MODULE_NOT_FOUND',
requireStack: [
'C:\\Users\\wangting\\Desktop\\Wisdom_admin\\wisdom_admin\\node_modules\\_@[email protected]@@vue\\cli-service\\bin\\vue-cli-service.js'
]
}
npm ERR! code ELIFECYCLE
npm ERR! errno 1
npm ERR! [email protected] dev: `vue-cli-service serve`
npm ERR! Exit status 1
npm ERR!
npm ERR! Failed at the [email protected] dev script.
npm ERR! This is probably not a problem with npm. There is likely additional logging output above.
npm ERR! A complete log of this run can be found in:
npm ERR! C:\Users\wangting\AppData\Roaming\npm-cache\_logs\2021-08-06T06_20_38_961Z-debug.log
PS C:\Users\wangting\Desktop\Wisdom_admin\wisdom_admin>
In case of such an error
you need to
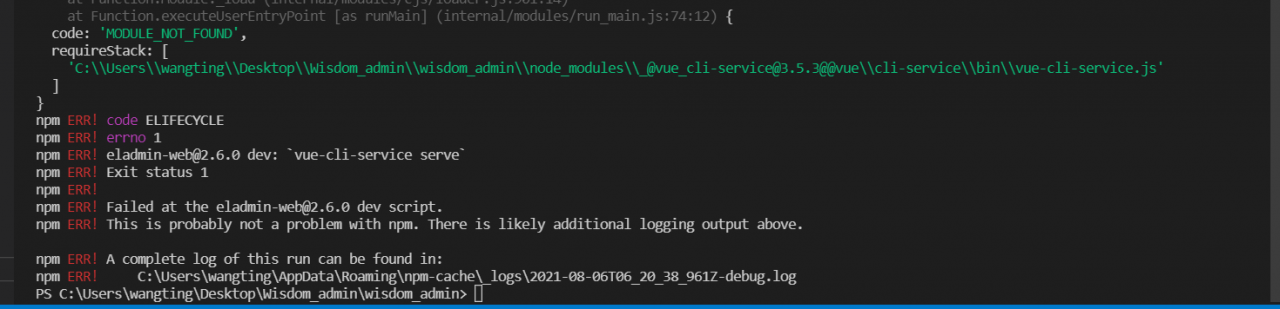
Delete node_ modules
Then open the vscode editor, open the terminal, enter the project directory, and install the dependencies
cnpm install
After dependency installation is complete
Just start it again
Restart
npm run dev
You’ll find it working normally

When you click the empty form button, an error will be reported because the form contains values that are not found;
For example, when active = 1, the prop of El form item is bound to username; When active = 2, prop binds gender;
When active = 1, the form contains username and gender, and gender is not displayed on the page. When the form is cleared, all values in the form will be cleared, and the gender field cannot be found, so an error is reported;
Solution:
Replace the resetfields provided with element with each item in the form as the initial value;
For example:
reset(formName){
this.form.username='',
this.form.gender=''
this.$nextTick(() => {
this.$refs[formName].clearValidate(); //To clear the checksum prompt
});
}Error Content.<option name="delegatedBuild" value="false" />2. Error reporting: