Solve the problem of solvepnp (outdim, indim, cameramatrix, distcoeff, RVEC, tvec); There is an unhandled exception at 0x00007ffbc3844b89 (in biaoding.exe): Microsoft C + + exception: CV:: exception, in the memory location of 0x000000571351b2d0
Mapping 3D point cloud to 2D image, using OpenCV solvepnp, running error
OpenCV(4.5.1) Error: Assertion failed (( (npoints >= 4) || (npoints == 3 && amp; flags == SOLVEPNP_ ITERATIVE && amp; useExtrinsicGuess) || (npoints >= 3 && amp; flags == SOLVEPNP_ SQPNP) ) && amp; npoints == std::max(ipoints.checkVector(2, CV_ 32F), ipoints.checkVector(2, CV_ 64F))) in cv::solvePnPGeneric, file C:\build\master_ winpack-build-win64-vc15\opencv\modules\calib3d\src\solvepnp.cpp, line 802
The error is as follows:

The input coordinates of 3D point cloud and 2D pixel are:

Conversion type:

After the conversion, the output of outdim and indim is changed, and it is no longer a 6 * 3 matrix, so an error will be reported
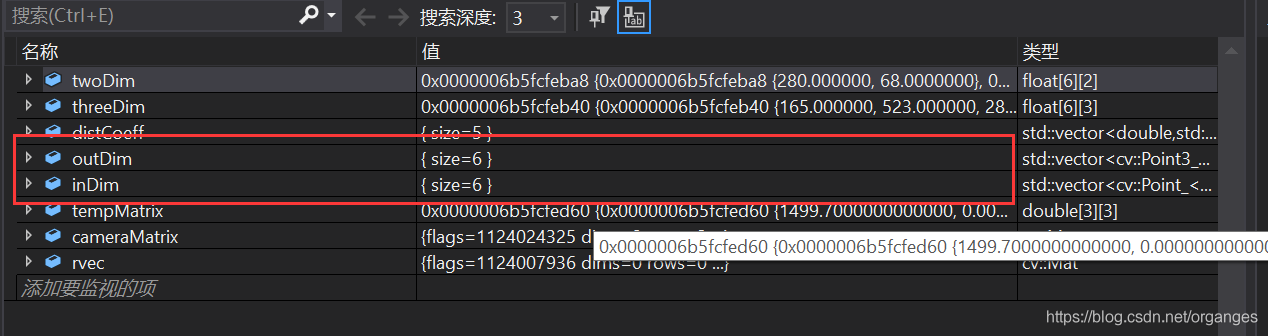
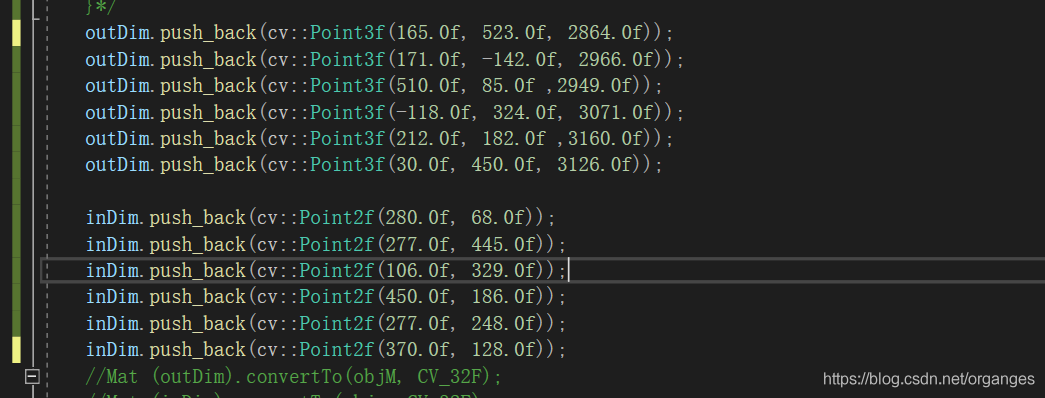
So the error is because the matrix dimensions in solvepnp are inconsistent. The solution is to use push again in the most stupid way_ Back redefines outdim and indim, instead of using for loop to define outdim and indim, just in case cameramatrix is also redefined

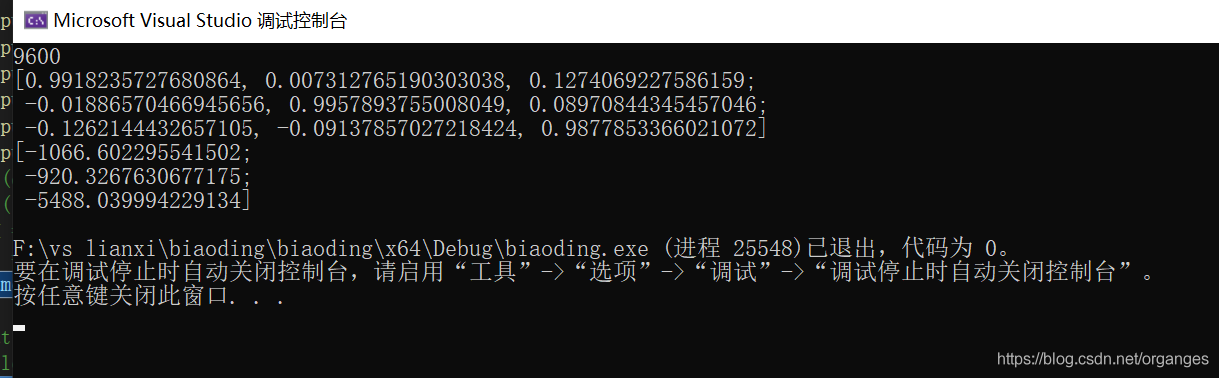
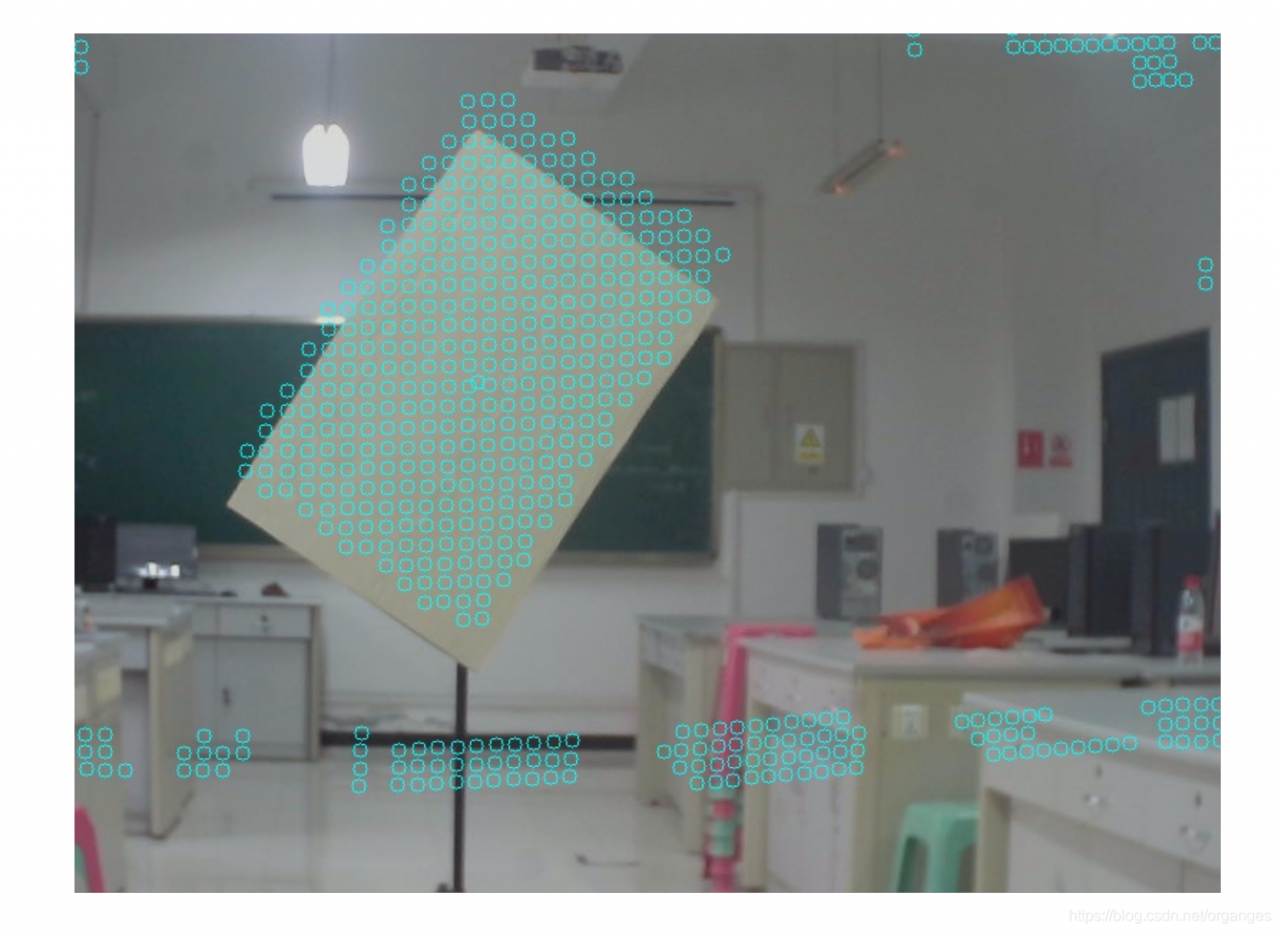
Finally, the rotation translation matrix from radar to camera and the result map of point cloud mapping to image are obtained
Read More:
- Opencv problem: opencv error: assertion failed (! Empty()) in detectmultiscale
- OpenCV error: (-215:Assertion failed) !_src.empty() in function ‘cv::cvtColor‘
- cv2.error: OpenCV(3.4.2) error: (-215:Assertion failed) !empty() in function ‘detectMultiScale‘
- Successfully solved opencv error: assertion failed (SCN = = 3 | SCN = = 4) in CV:: cvtcolor
- Unity 3D – assertion failed: assertion failed on expression: ‘! Getmaineditorwindow()’ error
- Assertion failed: Assertion failed on expression: ‘pred(* previous, *i)’
- Error: (- 215: assertion failed)
- Project files may be invalid appears when cmake compiles opencv3.1, and the debug additional dependency of the compiled opencv3.1 is at the end
- Opencv perfect configuration strategy 2015 (win7 + opencv 2.4.9 + vs 2013)
- [opencv + openvino] opencv-vino4.5.1 + opencv contrib installation
- PCL Programming Notes — assertion ` PX! = 0 ‘failed
- error: (-215:Assertion failed) !ssize.empty() in function ‘resize‘
- When ifconfig configures the network, “siocsifaddr: no such device” and “eth0: error while getting interface” appear flags:No such dev”
- Debug Assertion Failed! Detailed solution
- Unit error assertion failed on expression
- RT-thread assertion failed at function:rt_application_init
- (-215:Assertion failed) 0 <= contourIdx && contourIdx < (int)last in function ‘cv::drawContours‘
- [Solved] Unity Error: Assertion failed on expression: ‘m_ErrorCode == MDB_MAP_RESIZED
- Installing opencv and Linux Makefile:160 : recipe for target ‘all’ failed problem resolution
- Information contained in Debug Assertion Failed of Microsoft Visual C++ Runtime Library