Problems encountered during ROS learning:
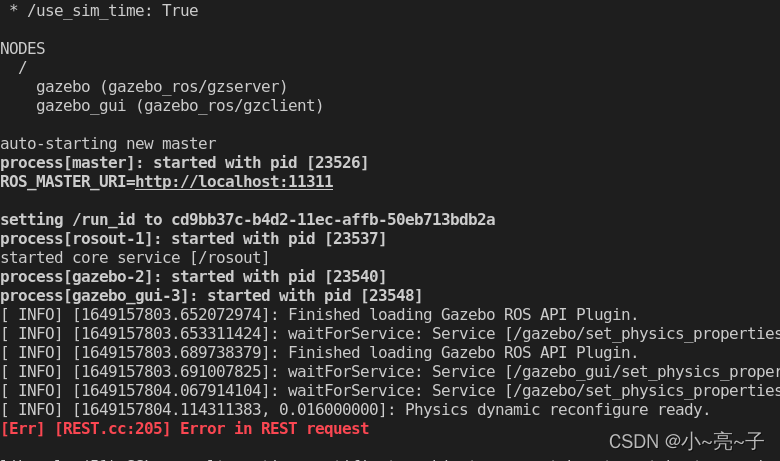
Err] [REST.cc:205] Error in REST request
Gazebo has been installed when ROS is installed. Use the following command to check whether the installation is successful, and open the gazebo simulation environment.
roslaunch gazebo_ros empty_world.launch
When opening gazebo in ROS for the first time, error will be report: Err] [REST.cc:205] Error in REST request
As shown in the figure below:
Solution:
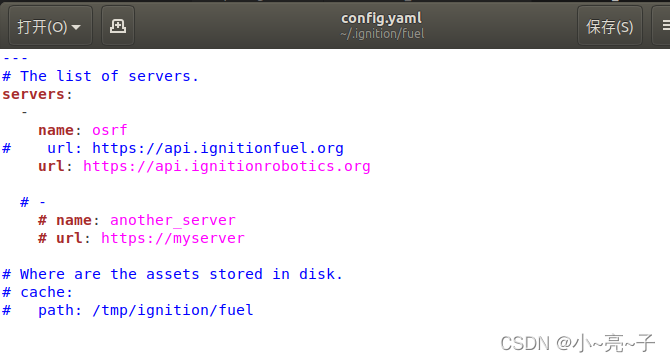
It needs to be modified .ignition/fuel/config.yaml file
Open yaml file command:
sudo gedit ~/.ignition/fuel/config.yaml
Use # to comment out this code: url: https://api.ignitionfuel.org
Then add
url: https://api.ignitionrobotics.org
As shown in the following figure:
run the launch command again, and you will not see the above error warning.
roslaunch gazebo_ros empty_world.launch