Error form:
[ERROR] [1641817876.599786098, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/base_ link_ to_ body [ERROR] [1641817876.603696804, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/body_ to_ arm1 [ERROR] [1641817876.606541981, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm1_ to_ arm1_ 01 [ERROR] [1641817876.609254992, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm1_ 01_ to_ arm1_ 02 [ERROR] [1641817876.613152929, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm1_ 02_ to_ arm1_ 03 [ERROR] [1641817876.617461705, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm1_ 03_ to_ arm1_ 04 [ERROR] [1641817876.620764539, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm1_ 04_ to_ arm1_ 05 [ERROR] [1641817876.623382280, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm1_ 05_ to_ wrist1 [ERROR] [1641817876.625858862, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/wrist1_ to_ hand1_ 01 [ERROR] [1641817876.628437624, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/wrist1_ to_ hand1_ 02 [ERROR] [1641817876.634538529, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/body_ to_ arm2_ 01 [ERROR] [1641817876.639608274, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm2_ 01_ to_ arm2_ 02 [ERROR] [1641817876.643080333, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm2_ 02_ to_ arm2_ 03 [ERROR] [1641817876.646745202, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm2_ 03_ to_ arm2_ 04 [ERROR] [1641817876.650024387, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm2_ 04_ to_ arm2_ 05 [ERROR] [1641817876.652968097, 0.001000000]: No p gain specified for pid. Namespace: /nuclear_ robot/gazebo_ ros_ control/pid_ gains/arm2_ 05_ to_ wrist2
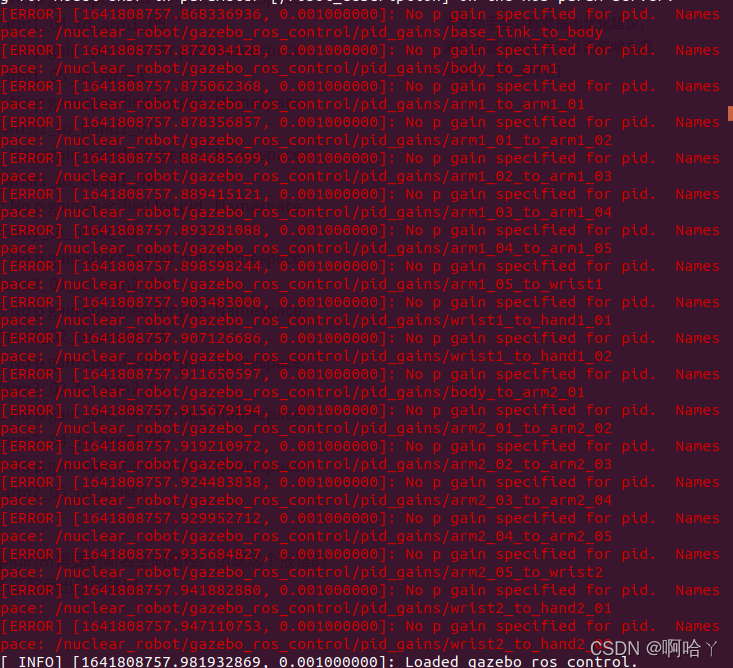
Notice the black part I added in the previous errors, which is the namespace path required to configure the PID. The reason for this error is that the named path in the configuration file does not match the PID requirements.
Solution:
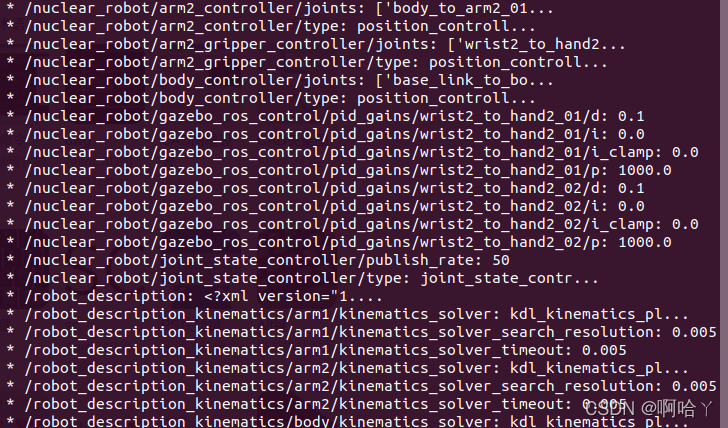
First, you need to go through the message output of the .launch command you ran. Look at the namespace path output after you read in the configuration file. The image below shows the namespace path when I reported the error, and the form of the configuration file.
Differences in namespace paths can be seen at
Expected: Namespace: /nuclear_robot/gazebo_ros_control/pid_gains/~
Actual: Namespace: /nuclear_robot/arm1_controller/gains/~
So we need to make the configuration file changes based on the expected namespace path.
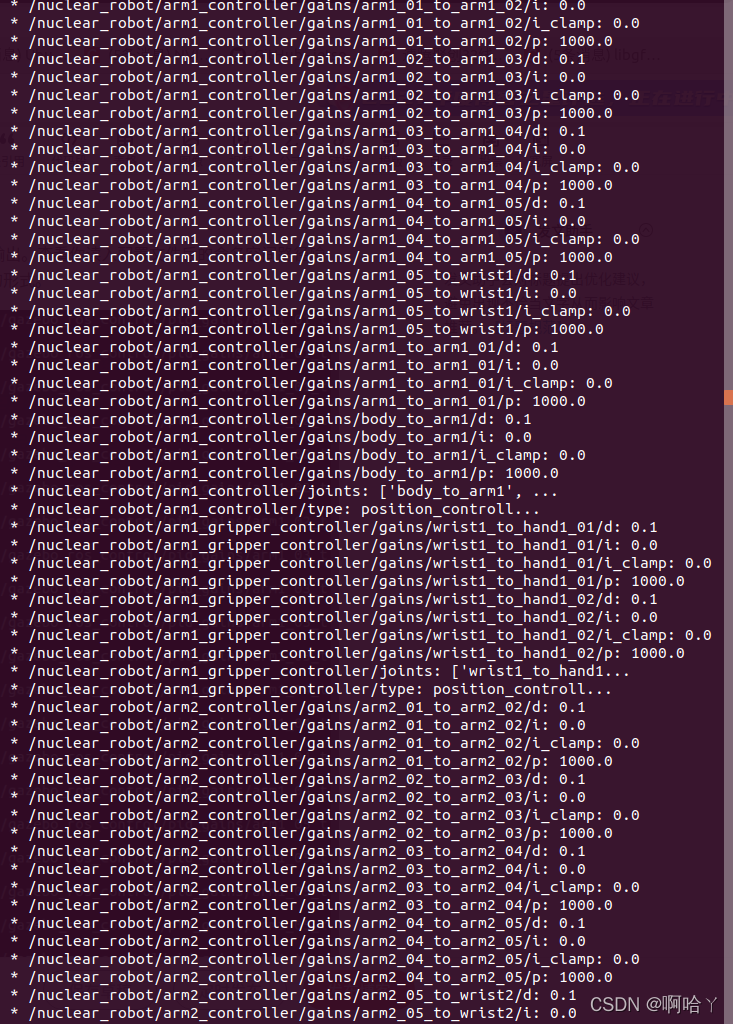
After initially just changing the configuration file in the gains to pid_gains and adding the line gazebo_ros_control before pid_gains, the problem is still not solved and the output is as follows.
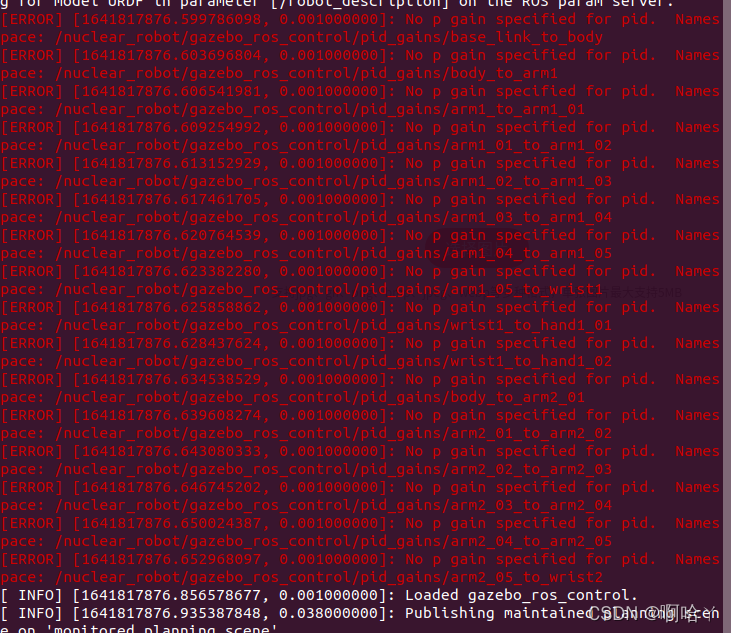
From the output log, I could see that only the last two joints were loaded with parameters when the configuration file was loaded, and the pid of the last two joints was missing from the output of the error report.
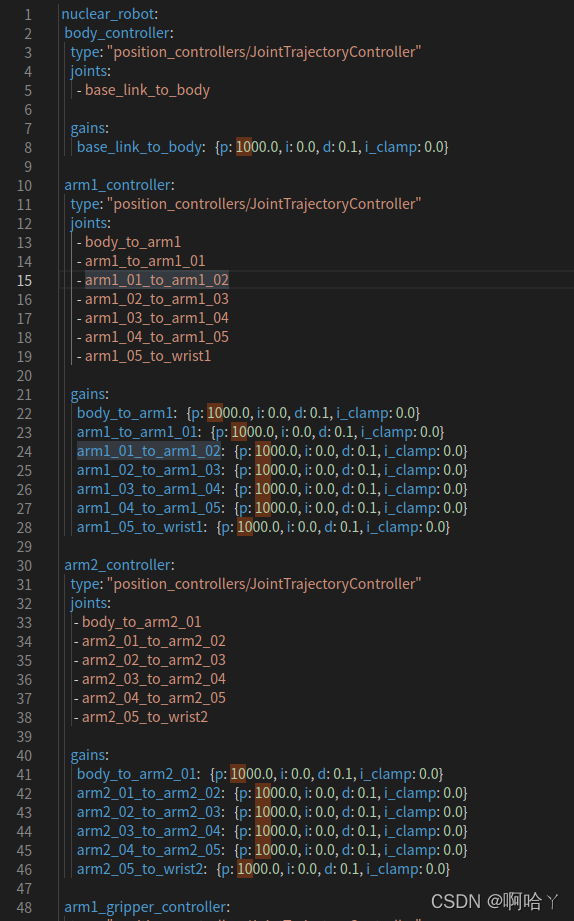
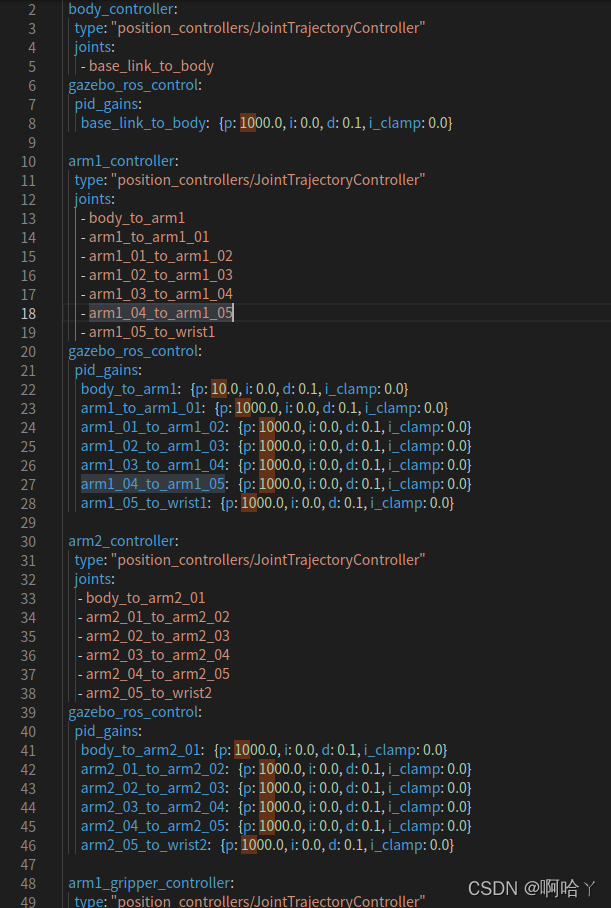
So I moved the pid configuration of each joint to the end, and the problem was solved.
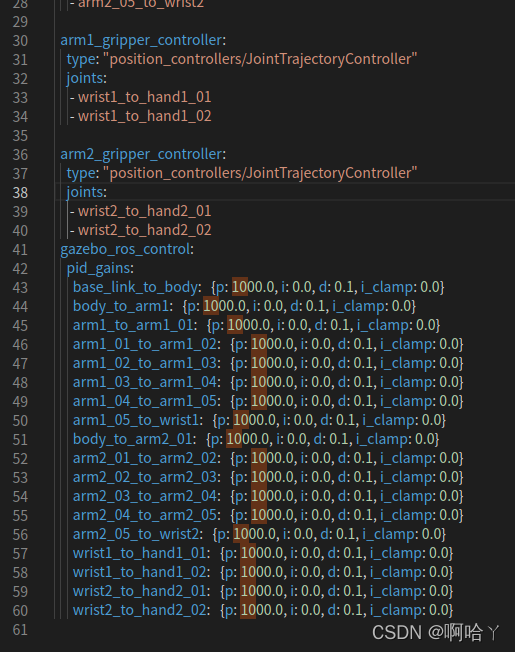
It should be noted that when rewriting the configuration file yaml, pay attention to the writing format and indentation (very important)
The following is the final output (there is no longer a large section of dazzling red error reports):
started roslaunch server http://localhost:41631/
SUMMARY
========
PARAMETERS
* /gazebo/enable_ros_network: True
* /move_group/allow_trajectory_execution: True
* /move_group/arm1/longest_valid_segment_fraction: 0.005
* /move_group/arm1/planner_configs: ['SBL', 'EST', 'L...
* /move_group/arm1/projection_evaluator: joints(body_to_ar...
* /move_group/arm1_gripper/longest_valid_segment_fraction: 0.005
* /move_group/arm1_gripper/planner_configs: ['SBL', 'EST', 'L...
* /move_group/arm1_gripper/projection_evaluator: joints(wrist1_to_...
* /move_group/arm2/longest_valid_segment_fraction: 0.005
* /move_group/arm2/planner_configs: ['SBL', 'EST', 'L...
* /move_group/arm2/projection_evaluator: joints(body_to_ar...
* /move_group/arm2_gripper/longest_valid_segment_fraction: 0.005
* /move_group/arm2_gripper/planner_configs: ['SBL', 'EST', 'L...
* /move_group/arm2_gripper/projection_evaluator: joints(wrist2_to_...
* /move_group/body/planner_configs: ['SBL', 'EST', 'L...
* /move_group/capabilities:
* /move_group/controller_list: [{'default': True...
* /move_group/controller_manager_ns: controller_manager
* /move_group/disable_capabilities:
* /move_group/jiggle_fraction: 0.05
* /move_group/max_range: 5.0
* /move_group/max_safe_path_cost: 1
* /move_group/moveit_controller_manager: moveit_simple_con...
* /move_group/moveit_manage_controllers: True
* /move_group/octomap_resolution: 0.025
* /move_group/planner_configs/BFMT/balanced: 0
* /move_group/planner_configs/BFMT/cache_cc: 1
* /move_group/planner_configs/BFMT/extended_fmt: 1
* /move_group/planner_configs/BFMT/heuristics: 1
* /move_group/planner_configs/BFMT/nearest_k: 1
* /move_group/planner_configs/BFMT/num_samples: 1000
* /move_group/planner_configs/BFMT/optimality: 1
* /move_group/planner_configs/BFMT/radius_multiplier: 1.0
* /move_group/planner_configs/BFMT/type: geometric::BFMT
* /move_group/planner_configs/BKPIECE/border_fraction: 0.9
* /move_group/planner_configs/BKPIECE/failed_expansion_score_factor: 0.5
* /move_group/planner_configs/BKPIECE/min_valid_path_fraction: 0.5
* /move_group/planner_configs/BKPIECE/range: 0.0
* /move_group/planner_configs/BKPIECE/type: geometric::BKPIECE
* /move_group/planner_configs/BiEST/range: 0.0
* /move_group/planner_configs/BiEST/type: geometric::BiEST
* /move_group/planner_configs/BiTRRT/cost_threshold: 1e300
* /move_group/planner_configs/BiTRRT/frountier_node_ratio: 0.1
* /move_group/planner_configs/BiTRRT/frountier_threshold: 0.0
* /move_group/planner_configs/BiTRRT/init_temperature: 100
* /move_group/planner_configs/BiTRRT/range: 0.0
* /move_group/planner_configs/BiTRRT/temp_change_factor: 0.1
* /move_group/planner_configs/BiTRRT/type: geometric::BiTRRT
* /move_group/planner_configs/EST/goal_bias: 0.05
* /move_group/planner_configs/EST/range: 0.0
* /move_group/planner_configs/EST/type: geometric::EST
* /move_group/planner_configs/FMT/cache_cc: 1
* /move_group/planner_configs/FMT/extended_fmt: 1
* /move_group/planner_configs/FMT/heuristics: 0
* /move_group/planner_configs/FMT/nearest_k: 1
* /move_group/planner_configs/FMT/num_samples: 1000
* /move_group/planner_configs/FMT/radius_multiplier: 1.1
* /move_group/planner_configs/FMT/type: geometric::FMT
* /move_group/planner_configs/KPIECE/border_fraction: 0.9
* /move_group/planner_configs/KPIECE/failed_expansion_score_factor: 0.5
* /move_group/planner_configs/KPIECE/goal_bias: 0.05
* /move_group/planner_configs/KPIECE/min_valid_path_fraction: 0.5
* /move_group/planner_configs/KPIECE/range: 0.0
* /move_group/planner_configs/KPIECE/type: geometric::KPIECE
* /move_group/planner_configs/LBKPIECE/border_fraction: 0.9
* /move_group/planner_configs/LBKPIECE/min_valid_path_fraction: 0.5
* /move_group/planner_configs/LBKPIECE/range: 0.0
* /move_group/planner_configs/LBKPIECE/type: geometric::LBKPIECE
* /move_group/planner_configs/LBTRRT/epsilon: 0.4
* /move_group/planner_configs/LBTRRT/goal_bias: 0.05
* /move_group/planner_configs/LBTRRT/range: 0.0
* /move_group/planner_configs/LBTRRT/type: geometric::LBTRRT
* /move_group/planner_configs/LazyPRM/range: 0.0
* /move_group/planner_configs/LazyPRM/type: geometric::LazyPRM
* /move_group/planner_configs/LazyPRMstar/type: geometric::LazyPR...
* /move_group/planner_configs/PDST/type: geometric::PDST
* /move_group/planner_configs/PRM/max_nearest_neighbors: 10
* /move_group/planner_configs/PRM/type: geometric::PRM
* /move_group/planner_configs/PRMstar/type: geometric::PRMstar
* /move_group/planner_configs/ProjEST/goal_bias: 0.05
* /move_group/planner_configs/ProjEST/range: 0.0
* /move_group/planner_configs/ProjEST/type: geometric::ProjEST
* /move_group/planner_configs/RRT/goal_bias: 0.05
* /move_group/planner_configs/RRT/range: 0.0
* /move_group/planner_configs/RRT/type: geometric::RRT
* /move_group/planner_configs/RRTConnect/range: 0.0
* /move_group/planner_configs/RRTConnect/type: geometric::RRTCon...
* /move_group/planner_configs/RRTstar/delay_collision_checking: 1
* /move_group/planner_configs/RRTstar/goal_bias: 0.05
* /move_group/planner_configs/RRTstar/range: 0.0
* /move_group/planner_configs/RRTstar/type: geometric::RRTstar
* /move_group/planner_configs/SBL/range: 0.0
* /move_group/planner_configs/SBL/type: geometric::SBL
* /move_group/planner_configs/SPARS/dense_delta_fraction: 0.001
* /move_group/planner_configs/SPARS/max_failures: 1000
* /move_group/planner_configs/SPARS/sparse_delta_fraction: 0.25
* /move_group/planner_configs/SPARS/stretch_factor: 3.0
* /move_group/planner_configs/SPARS/type: geometric::SPARS
* /move_group/planner_configs/SPARStwo/dense_delta_fraction: 0.001
* /move_group/planner_configs/SPARStwo/max_failures: 5000
* /move_group/planner_configs/SPARStwo/sparse_delta_fraction: 0.25
* /move_group/planner_configs/SPARStwo/stretch_factor: 3.0
* /move_group/planner_configs/SPARStwo/type: geometric::SPARStwo
* /move_group/planner_configs/STRIDE/degree: 16
* /move_group/planner_configs/STRIDE/estimated_dimension: 0.0
* /move_group/planner_configs/STRIDE/goal_bias: 0.05
* /move_group/planner_configs/STRIDE/max_degree: 18
* /move_group/planner_configs/STRIDE/max_pts_per_leaf: 6
* /move_group/planner_configs/STRIDE/min_degree: 12
* /move_group/planner_configs/STRIDE/min_valid_path_fraction: 0.2
* /move_group/planner_configs/STRIDE/range: 0.0
* /move_group/planner_configs/STRIDE/type: geometric::STRIDE
* /move_group/planner_configs/STRIDE/use_projected_distance: 0
* /move_group/planner_configs/TRRT/frountierNodeRatio: 0.1
* /move_group/planner_configs/TRRT/frountier_threshold: 0.0
* /move_group/planner_configs/TRRT/goal_bias: 0.05
* /move_group/planner_configs/TRRT/init_temperature: 10e-6
* /move_group/planner_configs/TRRT/k_constant: 0.0
* /move_group/planner_configs/TRRT/max_states_failed: 10
* /move_group/planner_configs/TRRT/min_temperature: 10e-10
* /move_group/planner_configs/TRRT/range: 0.0
* /move_group/planner_configs/TRRT/temp_change_factor: 2.0
* /move_group/planner_configs/TRRT/type: geometric::TRRT
* /move_group/planning_plugin: ompl_interface/OM...
* /move_group/planning_scene_monitor/publish_geometry_updates: True
* /move_group/planning_scene_monitor/publish_planning_scene: True
* /move_group/planning_scene_monitor/publish_state_updates: True
* /move_group/planning_scene_monitor/publish_transforms_updates: True
* /move_group/request_adapters: default_planner_r...
* /move_group/sensors: [{'point_subsampl...
* /move_group/start_state_max_bounds_error: 0.1
* /move_group/trajectory_execution/allowed_execution_duration_scaling: 1.2
* /move_group/trajectory_execution/allowed_goal_duration_margin: 0.5
* /move_group/trajectory_execution/allowed_start_tolerance: 0.01
* /nuclear_robot/arm1_controller/joints: ['body_to_arm1', ...
* /nuclear_robot/arm1_controller/type: position_controll...
* /nuclear_robot/arm1_gripper_controller/joints: ['wrist1_to_hand1...
* /nuclear_robot/arm1_gripper_controller/type: position_controll...
* /nuclear_robot/arm2_controller/joints: ['body_to_arm2_01...
* /nuclear_robot/arm2_controller/type: position_controll...
* /nuclear_robot/arm2_gripper_controller/joints: ['wrist2_to_hand2...
* /nuclear_robot/arm2_gripper_controller/type: position_controll...
* /nuclear_robot/body_controller/joints: ['base_link_to_bo...
* /nuclear_robot/body_controller/type: position_controll...
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_01_to_arm1_02/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_01_to_arm1_02/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_01_to_arm1_02/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_01_to_arm1_02/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_02_to_arm1_03/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_02_to_arm1_03/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_02_to_arm1_03/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_02_to_arm1_03/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_03_to_arm1_04/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_03_to_arm1_04/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_03_to_arm1_04/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_03_to_arm1_04/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_04_to_arm1_05/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_04_to_arm1_05/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_04_to_arm1_05/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_04_to_arm1_05/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_05_to_wrist1/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_05_to_wrist1/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_05_to_wrist1/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_05_to_wrist1/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_to_arm1_01/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_to_arm1_01/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_to_arm1_01/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm1_to_arm1_01/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_01_to_arm2_02/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_01_to_arm2_02/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_01_to_arm2_02/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_01_to_arm2_02/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_02_to_arm2_03/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_02_to_arm2_03/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_02_to_arm2_03/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_02_to_arm2_03/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_03_to_arm2_04/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_03_to_arm2_04/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_03_to_arm2_04/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_03_to_arm2_04/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_04_to_arm2_05/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_04_to_arm2_05/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_04_to_arm2_05/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_04_to_arm2_05/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_05_to_wrist2/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_05_to_wrist2/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_05_to_wrist2/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/arm2_05_to_wrist2/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/base_link_to_body/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/base_link_to_body/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/base_link_to_body/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/base_link_to_body/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm1/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm1/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm1/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm1/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm2_01/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm2_01/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm2_01/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/body_to_arm2_01/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_01/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_01/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_01/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_01/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_02/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_02/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_02/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist1_to_hand1_02/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_01/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_01/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_01/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_01/p: 1000.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_02/d: 0.1
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_02/i: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_02/i_clamp: 0.0
* /nuclear_robot/gazebo_ros_control/pid_gains/wrist2_to_hand2_02/p: 1000.0
* /nuclear_robot/joint_state_controller/publish_rate: 50
* /nuclear_robot/joint_state_controller/type: joint_state_contr...
* /robot_description: <?xml version="1....
* /robot_description_kinematics/arm1/kinematics_solver: kdl_kinematics_pl...
* /robot_description_kinematics/arm1/kinematics_solver_search_resolution: 0.005
* /robot_description_kinematics/arm1/kinematics_solver_timeout: 0.005
* /robot_description_kinematics/arm2/kinematics_solver: kdl_kinematics_pl...
* /robot_description_kinematics/arm2/kinematics_solver_search_resolution: 0.005
* /robot_description_kinematics/arm2/kinematics_solver_timeout: 0.005
* /robot_description_kinematics/body/kinematics_solver: kdl_kinematics_pl...
* /robot_description_kinematics/body/kinematics_solver_search_resolution: 0.005
* /robot_description_kinematics/body/kinematics_solver_timeout: 0.005
* /robot_description_planning/joint_limits/arm1_01_to_arm1_02/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm1_01_to_arm1_02/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm1_01_to_arm1_02/max_acceleration: 0
* /robot_description_planning/joint_limits/arm1_01_to_arm1_02/max_velocity: 0
* /robot_description_planning/joint_limits/arm1_02_to_arm1_03/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm1_02_to_arm1_03/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm1_02_to_arm1_03/max_acceleration: 0
* /robot_description_planning/joint_limits/arm1_02_to_arm1_03/max_velocity: 0
* /robot_description_planning/joint_limits/arm1_03_to_arm1_04/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm1_03_to_arm1_04/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm1_03_to_arm1_04/max_acceleration: 0
* /robot_description_planning/joint_limits/arm1_03_to_arm1_04/max_velocity: 0
* /robot_description_planning/joint_limits/arm1_04_to_arm1_05/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm1_04_to_arm1_05/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm1_04_to_arm1_05/max_acceleration: 0
* /robot_description_planning/joint_limits/arm1_04_to_arm1_05/max_velocity: 0
* /robot_description_planning/joint_limits/arm1_05_to_wrist1/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm1_05_to_wrist1/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm1_05_to_wrist1/max_acceleration: 0
* /robot_description_planning/joint_limits/arm1_05_to_wrist1/max_velocity: 0
* /robot_description_planning/joint_limits/arm1_to_arm1_01/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm1_to_arm1_01/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm1_to_arm1_01/max_acceleration: 0
* /robot_description_planning/joint_limits/arm1_to_arm1_01/max_velocity: 0
* /robot_description_planning/joint_limits/arm2_01_to_arm2_02/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm2_01_to_arm2_02/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm2_01_to_arm2_02/max_acceleration: 0
* /robot_description_planning/joint_limits/arm2_01_to_arm2_02/max_velocity: 0
* /robot_description_planning/joint_limits/arm2_02_to_arm2_03/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm2_02_to_arm2_03/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm2_02_to_arm2_03/max_acceleration: 0
* /robot_description_planning/joint_limits/arm2_02_to_arm2_03/max_velocity: 0
* /robot_description_planning/joint_limits/arm2_03_to_arm2_04/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm2_03_to_arm2_04/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm2_03_to_arm2_04/max_acceleration: 0
* /robot_description_planning/joint_limits/arm2_03_to_arm2_04/max_velocity: 0
* /robot_description_planning/joint_limits/arm2_04_to_arm2_05/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm2_04_to_arm2_05/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm2_04_to_arm2_05/max_acceleration: 0
* /robot_description_planning/joint_limits/arm2_04_to_arm2_05/max_velocity: 0
* /robot_description_planning/joint_limits/arm2_05_to_wrist2/has_acceleration_limits: False
* /robot_description_planning/joint_limits/arm2_05_to_wrist2/has_velocity_limits: False
* /robot_description_planning/joint_limits/arm2_05_to_wrist2/max_acceleration: 0
* /robot_description_planning/joint_limits/arm2_05_to_wrist2/max_velocity: 0
* /robot_description_planning/joint_limits/base_link_to_body/has_acceleration_limits: False
* /robot_description_planning/joint_limits/base_link_to_body/has_velocity_limits: False
* /robot_description_planning/joint_limits/base_link_to_body/max_acceleration: 0
* /robot_description_planning/joint_limits/base_link_to_body/max_velocity: 0
* /robot_description_planning/joint_limits/body_to_arm1/has_acceleration_limits: False
* /robot_description_planning/joint_limits/body_to_arm1/has_velocity_limits: False
* /robot_description_planning/joint_limits/body_to_arm1/max_acceleration: 0
* /robot_description_planning/joint_limits/body_to_arm1/max_velocity: 0
* /robot_description_planning/joint_limits/body_to_arm2_01/has_acceleration_limits: False
* /robot_description_planning/joint_limits/body_to_arm2_01/has_velocity_limits: False
* /robot_description_planning/joint_limits/body_to_arm2_01/max_acceleration: 0
* /robot_description_planning/joint_limits/body_to_arm2_01/max_velocity: 0
* /robot_description_planning/joint_limits/wrist1_to_hand1_01/has_acceleration_limits: False
* /robot_description_planning/joint_limits/wrist1_to_hand1_01/has_velocity_limits: False
* /robot_description_planning/joint_limits/wrist1_to_hand1_01/max_acceleration: 0
* /robot_description_planning/joint_limits/wrist1_to_hand1_01/max_velocity: 0
* /robot_description_planning/joint_limits/wrist1_to_hand1_02/has_acceleration_limits: False
* /robot_description_planning/joint_limits/wrist1_to_hand1_02/has_velocity_limits: False
* /robot_description_planning/joint_limits/wrist1_to_hand1_02/max_acceleration: 0
* /robot_description_planning/joint_limits/wrist1_to_hand1_02/max_velocity: 0
* /robot_description_planning/joint_limits/wrist2_to_hand2_01/has_acceleration_limits: False
* /robot_description_planning/joint_limits/wrist2_to_hand2_01/has_velocity_limits: False
* /robot_description_planning/joint_limits/wrist2_to_hand2_01/max_acceleration: 0
* /robot_description_planning/joint_limits/wrist2_to_hand2_01/max_velocity: 0
* /robot_description_planning/joint_limits/wrist2_to_hand2_02/has_acceleration_limits: False
* /robot_description_planning/joint_limits/wrist2_to_hand2_02/has_velocity_limits: False
* /robot_description_planning/joint_limits/wrist2_to_hand2_02/max_acceleration: 0
* /robot_description_planning/joint_limits/wrist2_to_hand2_02/max_velocity: 0
* /robot_description_semantic: <?xml version="1....
* /rosdistro: melodic
* /rosversion: 1.14.12
* /use_sim_time: True
NODES
/
gazebo (gazebo_ros/gzserver)
gazebo_gui (gazebo_ros/gzclient)
move_group (moveit_ros_move_group/move_group)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
rviz_xavier_3542_1884457764229678358 (rviz/rviz)
urdf_spawner (gazebo_ros/spawn_model)
/nuclear_robot/
arm_controller_spawner (controller_manager/spawner)
joint_controller_spawner (controller_manager/spawner)
auto-starting new master
process[master]: started with pid [3556]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 4bb68466-7212-11ec-be33-1cbfcea047cb
process[rosout-1]: started with pid [3570]
started core service [/rosout]
process[gazebo-2]: started with pid [3588]
process[gazebo_gui-3]: started with pid [3593]
process[urdf_spawner-4]: started with pid [3598]
process[nuclear_robot/joint_controller_spawner-5]: started with pid [3600]
process[robot_state_publisher-6]: started with pid [3601]
process[nuclear_robot/arm_controller_spawner-7]: started with pid [3602]
process[move_group-8]: started with pid [3607]
process[rviz_xavier_3542_1884457764229678358-9]: started with pid [3617]
[ INFO] [1641818347.545128890]: Loading robot model 'nuclear_robot'...
[ INFO] [1641818347.715709828]: rviz version 1.13.23
[ INFO] [1641818347.715824138]: compiled against Qt version 5.9.5
[ INFO] [1641818347.715864397]: compiled against OGRE version 1.9.0 (Ghadamon)
[ INFO] [1641818347.749134869]: Forcing OpenGl version 0.
[INFO] [1641818348.011125, 0.000000]: Controller Spawner: Waiting for service controller_manager/load_controller
[INFO] [1641818348.055441, 0.000000]: Controller Spawner: Waiting for service controller_manager/load_controller
[ INFO] [1641818348.547783589]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1641818348.559743776]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[ INFO] [1641818348.566375745]: Stereo is NOT SUPPORTED
[ INFO] [1641818348.566578700]: OpenGL device: NVIDIA Tegra Xavier (nvgpu)/integrated
[ INFO] [1641818348.566671761]: OpenGl version: 4.6 (GLSL 4.6).
[ INFO] [1641818348.718173637]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1641818348.731496713]: waitForService: Service [/gazebo_gui/set_physics_properties] has not been advertised, waiting...
[INFO] [1641818349.077115, 0.000000]: Loading model XML from ros parameter robot_description
[INFO] [1641818349.117439, 0.000000]: Waiting for service /gazebo/spawn_urdf_model
[ INFO] [1641818349.851304741]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[INFO] [1641818350.047844, 0.065000]: Calling service /gazebo/spawn_urdf_model
[INFO] [1641818350.455892, 0.191000]: Spawn status: SpawnModel: Successfully spawned entity
[ INFO] [1641818350.504658217, 0.191000000]: Physics dynamic reconfigure ready.
[urdf_spawner-4] process has finished cleanly
log file: /home/nvidia/.ros/log/4bb68466-7212-11ec-be33-1cbfcea047cb/urdf_spawner-4*.log
[ INFO] [1641818351.543491188, 0.191000000]: Loading gazebo_ros_control plugin
[ INFO] [1641818351.543737345, 0.191000000]: Starting gazebo_ros_control plugin in namespace: /nuclear_robot
[ INFO] [1641818351.545993945, 0.191000000]: gazebo_ros_control plugin is waiting for model URDF in parameter [/robot_description] on the ROS param server.
[ INFO] [1641818351.770328428, 0.191000000]: Publishing maintained planning scene on 'monitored_planning_scene'
[ INFO] [1641818351.786675984, 0.191000000]: MoveGroup debug mode is ON
Starting planning scene monitors...
[ INFO] [1641818351.786780950, 0.191000000]: Starting planning scene monitor
[ INFO] [1641818351.805653249, 0.191000000]: Listening to '/planning_scene'
[ INFO] [1641818351.805806761, 0.191000000]: Starting world geometry update monitor for collision objects, attached objects, octomap updates.
[ INFO] [1641818351.826313355, 0.191000000]: Listening to '/collision_object'
[ INFO] [1641818351.848235576, 0.191000000]: Listening to '/planning_scene_world' for planning scene world geometry
[ INFO] [1641818353.272323132, 0.191000000]: Loaded gazebo_ros_control.
[ INFO] [1641818353.434858522, 0.267000000]: Loading robot model 'nuclear_robot'...
[INFO] [1641818353.512072, 0.297000]: Controller Spawner: Waiting for service controller_manager/switch_controller
[INFO] [1641818353.536834, 0.306000]: Controller Spawner: Waiting for service controller_manager/unload_controller
[INFO] [1641818353.546685, 0.309000]: Controller Spawner: Waiting for service controller_manager/switch_controller
[INFO] [1641818353.553371, 0.312000]: Loading controller: joint_state_controller
[INFO] [1641818353.571423, 0.319000]: Controller Spawner: Waiting for service controller_manager/unload_controller
[INFO] [1641818353.592808, 0.327000]: Loading controller: body_controller
[INFO] [1641818353.649680, 0.349000]: Controller Spawner: Loaded controllers: joint_state_controller
[INFO] [1641818353.971944, 0.481000]: Loading controller: arm1_controller
[INFO] [1641818353.975383, 0.483000]: Started controllers: joint_state_controller
[INFO] [1641818354.369832, 0.643000]: Loading controller: arm2_controller
[INFO] [1641818354.838744, 0.890000]: Loading controller: arm1_gripper_controller
[INFO] [1641818355.158097, 1.074000]: Loading controller: arm2_gripper_controller
[INFO] [1641818355.530871, 1.273000]: Controller Spawner: Loaded controllers: body_controller, arm1_controller, arm2_controller, arm1_gripper_controller, arm2_gripper_controller
[INFO] [1641818355.572662, 1.305000]: Started controllers: body_controller, arm1_controller, arm2_controller, arm1_gripper_controller, arm2_gripper_controller
[ INFO] [1641818358.639781941, 2.912000000]: Starting planning scene monitor
[ INFO] [1641818358.668084437, 2.931000000]: Listening to '/move_group/monitored_planning_scene'
[ INFO] [1641818359.836115338, 3.608000000]: waitForService: Service [/get_planning_scene] has not been advertised, waiting...
[ INFO] [1641818364.846962463, 6.492000000]: Failed to call service get_planning_scene, have you launched move_group or called psm.providePlanningSceneService()?
[ INFO] [1641818364.847315762, 6.492000000]: Constructing new MoveGroup connection for group 'arm1' in namespace ''
[ INFO] [1641818372.590419868, 11.084000000]: Listening to '/head_mount_kinect/depth_registered/points' using message filter with target frame 'base_footprint '
[ INFO] [1641818372.635730211, 11.110000000]: Listening to '/attached_collision_object' for attached collision objects
Planning scene monitors started.
[ INFO] [1641818372.705597859, 11.153000000]: Initializing OMPL interface using ROS parameters
[ INFO] [1641818373.225410564, 11.469000000]: Using planning interface 'OMPL'
[ INFO] [1641818373.237741139, 11.476000000]: Param 'default_workspace_bounds' was not set. Using default value: 10
[ INFO] [1641818373.245810079, 11.480000000]: Param 'start_state_max_bounds_error' was set to 0.1
[ INFO] [1641818373.248707577, 11.481000000]: Param 'start_state_max_dt' was not set. Using default value: 0.5
[ INFO] [1641818373.251800798, 11.483000000]: Param 'start_state_max_dt' was not set. Using default value: 0.5
[ INFO] [1641818373.254419081, 11.485000000]: Param 'jiggle_fraction' was set to 0.05
[ INFO] [1641818373.256732420, 11.486000000]: Param 'max_sampling_attempts' was not set. Using default value: 100
[ INFO] [1641818373.256952847, 11.487000000]: Using planning request adapter 'Add Time Parameterization'
[ INFO] [1641818373.257069942, 11.487000000]: Using planning request adapter 'Fix Workspace Bounds'
[ INFO] [1641818373.257232158, 11.487000000]: Using planning request adapter 'Fix Start State Bounds'
[ INFO] [1641818373.257344580, 11.487000000]: Using planning request adapter 'Fix Start State In Collision'
[ INFO] [1641818373.257447402, 11.487000000]: Using planning request adapter 'Fix Start State Path Constraints'
[ INFO] [1641818373.590199704, 11.685000000]: Added FollowJointTrajectory controller for nuclear_robot/body_controller
[ INFO] [1641818373.903175756, 11.878000000]: Added FollowJointTrajectory controller for nuclear_robot/arm1_controller
[ INFO] [1641818374.116014519, 12.016000000]: Added FollowJointTrajectory controller for nuclear_robot/arm2_controller
[ INFO] [1641818374.531673849, 12.239000000]: Added FollowJointTrajectory controller for nuclear_robot/arm1_gripper_controller
[ INFO] [1641818374.824725386, 12.420000000]: Added FollowJointTrajectory controller for nuclear_robot/arm2_gripper_controller
[ INFO] [1641818374.824951318, 12.422000000]: Returned 5 controllers in list
[ INFO] [1641818374.904395635, 12.466000000]: Trajectory execution is managing controllers
Loading 'move_group/ApplyPlanningSceneService'...
Loading 'move_group/ClearOctomapService'...
Loading 'move_group/MoveGroupCartesianPathService'...
Loading 'move_group/MoveGroupExecuteTrajectoryAction'...
Loading 'move_group/MoveGroupGetPlanningSceneService'...
Loading 'move_group/MoveGroupKinematicsService'...
Loading 'move_group/MoveGroupMoveAction'...
Loading 'move_group/MoveGroupPickPlaceAction'...
Loading 'move_group/MoveGroupPlanService'...
Loading 'move_group/MoveGroupQueryPlannersService'...
Loading 'move_group/MoveGroupStateValidationService'...
[ INFO] [1641818375.401474395, 12.760000000]:
********************************************************
* MoveGroup using:
* - ApplyPlanningSceneService
* - ClearOctomapService
* - CartesianPathService
* - ExecuteTrajectoryAction
* - GetPlanningSceneService
* - KinematicsService
* - MoveAction
* - PickPlaceAction
* - MotionPlanService
* - QueryPlannersService
* - StateValidationService
********************************************************
[ INFO] [1641818375.401743977, 12.760000000]: MoveGroup context using planning plugin ompl_interface/OMPLPlanner
[ INFO] [1641818375.401805836, 12.760000000]: MoveGroup context initialization complete
You can start planning now!
Read More:
- ROS Start Gazebo Error (First time): Err] [REST.cc:205] Error in REST request
- [Solved] ROS fatal error: alsa/asoundlib. h: There is no such directory or file
- [Solved] MAC Nginx Error: ginx.pid“ failed (2: No such file or directory)
- ROS2 Navigation Run TurtleBot Simulator Error [Solved]
- ROS package executes rosrun error: attributeerror: ‘thread’ object has no attribute ‘isalive‘
- [Solved] ROS Error: Could NOT find move_base_msgs
- ROS Error: Roslaunch got a ‘No such file or directory‘ error while attempting to run xterm -e gdb –args
- [Solved] ROS Error: cannot launch node of type [octomap_server/octomap_server_node]:octomap_server
- ROS Error: warning: “deprecated pixel format used“
- [Solved] Startservice error: Process: com.example.provider, PID: 31612
- How to Solve rqt Run error under ROS
- [Solved] ROS sudo rosdep init error: could not be downloaded
- ROS Error: Could not import “pyqt“ bindings of qt_gui_cpp library
- MySQL error: starting MySQL… The server quit without updating PID file
- [Solved] Verdi Crash Error: ICE default IO error handler doing an exit(), pid = 3475, errno = 32
- How to Solve Gazebo code 127
- Angular Error: No value accessor for form control with name ‘xxx’
- [PX4 Bug] make px4_sitl gazebo Error: CMake Error: The following variables are used in this project
- Gazebo Error: Error in REST request [How to Solve]
- [Solved] Warning: using directive refers to implicitly-defined namespace ‘std’