Convex hull detection of point cloud is more commonly used. PCL comes with Convex hull detection ConvexHull, which is a relatively simple function. Set the dimension setDimension of ConvexHull, and record it here
Header: #include <; pcl/surface/convex_hull.h>
Header: #include <; pcl/surface/convex_hull.h>
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile<pcl::PointXYZ>("bun_45.pcd", *cloud);
pcl::ConvexHull<pcl::PointXYZ> hull;
hull.setInputCloud(cloud);
hull.setDimension(3);
std::vector<pcl::Vertices> polygons;
pcl::PointCloud<pcl::PointXYZ>::Ptr surface_hull(new pcl::PointCloud<pcl::PointXYZ>);
hull.reconstruct(*surface_hull, polygons);
cout << surface_hull->size() << endl;
// ---------------------- Visualizer -------------------------------------------
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer);
viewer->setBackgroundColor(255,255,255);
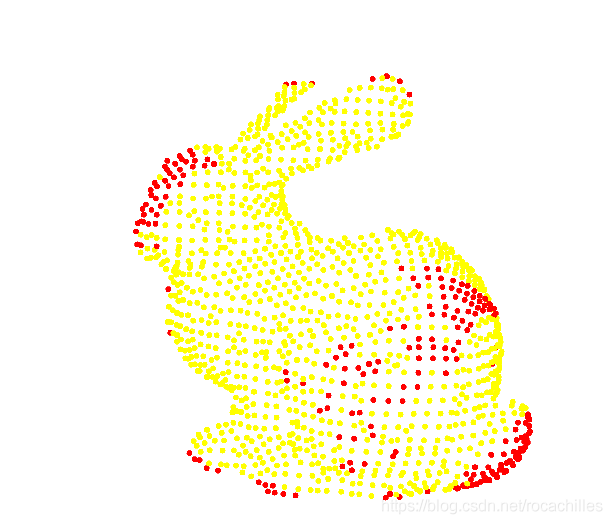
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> color_handler(cloud, 255, 255, 0);
viewer->addPointCloud(cloud, color_handler, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 6, "sample cloud");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> color_handlerK(surface_hull, 255, 0, 0);
viewer->addPointCloud(surface_hull, color_handlerK, "point");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 6, "point");
//viewer->addPolygon<pcl::PointXYZ>(surface_hull, 0, 0, 255, "polyline");
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
}Adopting Stanford Rabbit Point Cloud, the effect is shown in the figure below:
If the point cloud in a certain convex hull is further separated from the scene, Crophull can be used for filtering
CropHull filtering can refer to: https://blog.csdn.net/zfjBIT/article/details/92795689
Thanks for the correction of Xiao snail. If we get the convex hull curve, further triangulation is needed. It is not correct to connect the convex hull points only