1. Preface
Mobile trolley running gmapping algorithm to build a map
Gmapping is a SLAM algorithm based on 2D lidar that uses RBPF (Rao-Blackwellized Particle Filters) algorithm to complete the construction of two-dimensional grid maps.
Advantages: gmapping can build indoor environment maps in real time, with less calculation in small scenes, and high map accuracy, and low requirements for lidar scanning frequency.
Disadvantages: As the environment increases, the amount of memory and computation required to build the map will become huge, so gmapping is not suitable for large scene composition.
wiki address of gmapping in ROS
2. Errors and reasons
When the mobile car does the gmapping algorithm SLAM, it starts to report an error, and the prompt is as follows:
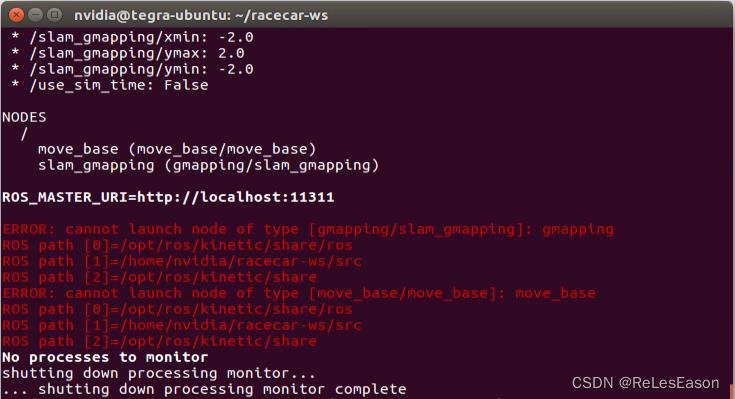
Reason"
After re-flashing Jetpack3.3 for the Jetson TX2 development board, the system does not have the ROS package of gmapping and move_base
3. Solution
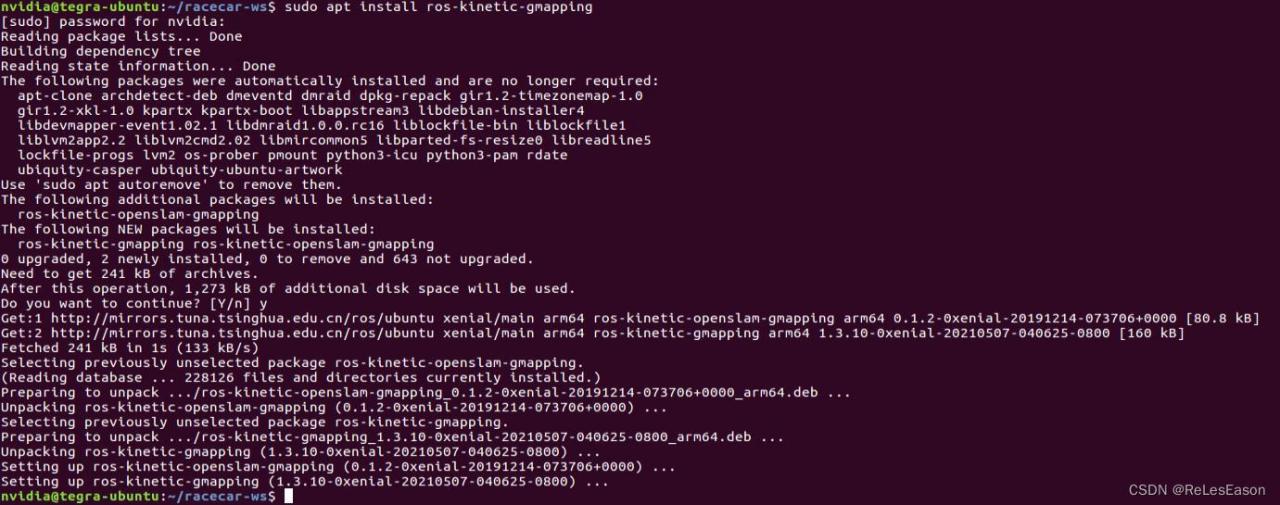
Install the appropriate package:
ROS package for gmapping:
sudo apt install ros-kinetic-gmapping
ROS package of move_base:
sudo apt install ros-kinetic-move-base

Run it again and it’s successful~
4. Summary
For this kind of error, just install the corresponding ROS package according to the prompts
Read More:
- ERROR: cannot launch node of type [amcl/amcl]: amcl
- [Solved] ROS Error: cannot launch node of type [octomap_server/octomap_server_node]:octomap_server
- Module build failed: Error: Node Sass version 6.0.0 is incompatible with ^4.0.0
- NPM run dev Error Module build failed: Error: Cannot find module ‘node-sass’
- [Solved] rqt_graph Skipped loading plugin with error & Format: “dot“ not recognized
- Jenkins uses NPM to build Vue error, and the manual build is normal
- [Solved] MindSpore Error: task_fail_info or current_graph_ is nullptr
- [Solved] Failed to allocate graph: MYRIAD device is not opened.
- [Solved] Pytorch Error: RuntimeError: Trying to backward through the graph a second time
- Node Kubelet Error: node “xxxxx“ not found [How to Solve]
- [How to Solve] Internal: blas sgemm launch failed
- [Solved] VINS-MONO: integer_sequence_algorithm.h:64:21: error: ‘integer_sequence’ is not a member of ‘std’
- [Solved] The method getContextPath() from the type HttpServletRequest refers to the missing type String
- [Solved] src/delly.h:8:42: fatal error: boost/graph/adjacency_list.hpp: No such file or directory
- [Solved] ssh secure shell: server responded algorithm negotiation failed
- [Solved] Mac M1 Debug Error: could not launch process: can not run under Rosetta
- launch file Run Error: Resourcenotfound: XXX [How to Solve]
- How to Solve Docker ERROR: Service’workspace’ failed to build: ERROR: Service’php-fpm’ failed to build
- Libtorch Error: Expected object of type Variable but found type CUDALongType for argument #2 ‘index’