1. Preface
Mobile trolley running gmapping algorithm to build a map
Gmapping is a SLAM algorithm based on 2D lidar that uses RBPF (Rao-Blackwellized Particle Filters) algorithm to complete the construction of two-dimensional grid maps.
Advantages: gmapping can build indoor environment maps in real time, with less calculation in small scenes, and high map accuracy, and low requirements for lidar scanning frequency.
Disadvantages: As the environment increases, the amount of memory and computation required to build the map will become huge, so gmapping is not suitable for large scene composition.
wiki address of gmapping in ROS
2. Errors and reasons
When the mobile car does the gmapping algorithm SLAM, it starts to report an error, and the prompt is as follows:
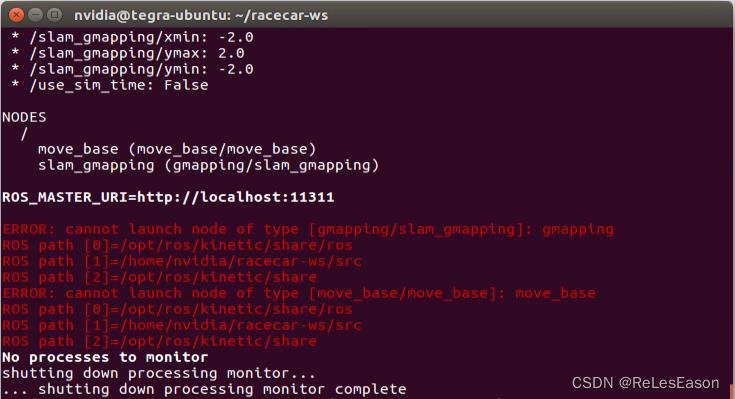
Reason"
After re-flashing Jetpack3.3 for the Jetson TX2 development board, the system does not have the ROS package of gmapping and move_base
3. Solution
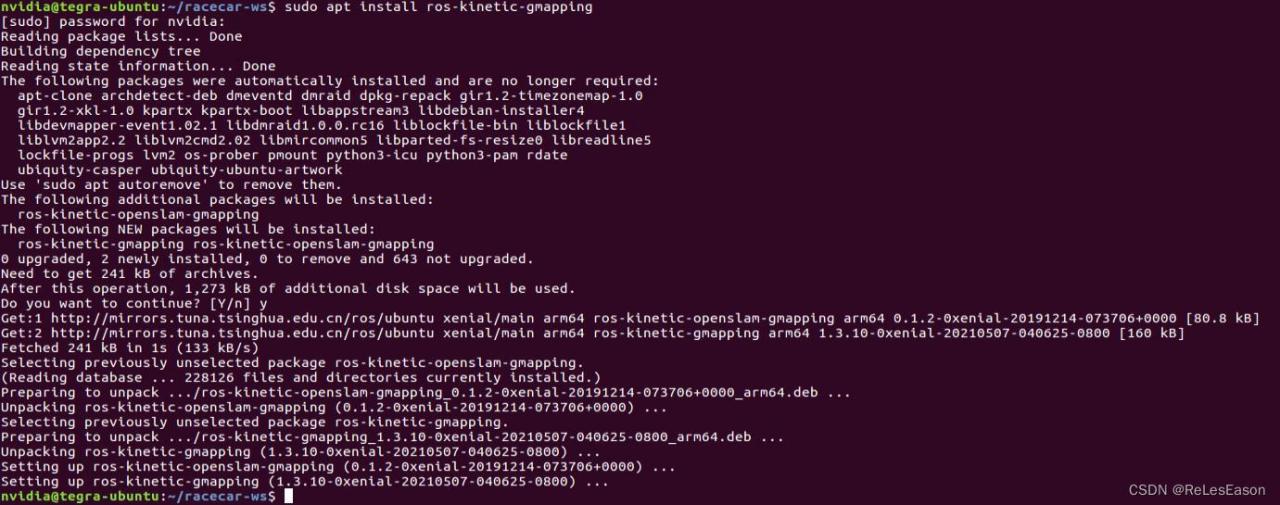
Install the appropriate package:
ROS package for gmapping:
sudo apt install ros-kinetic-gmapping
ROS package of move_base:
sudo apt install ros-kinetic-move-base

Run it again and it’s successful~
4. Summary
For this kind of error, just install the corresponding ROS package according to the prompts