ROS URDF adds sensor model
Add sensor model
Add camera
The corresponding model file is camera.xacro, which reads as follows
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="camera">
<xacro:macro name="usb_camera" params="prefix:=camera">
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
</collision>
</link>
</xacro:macro>
</robot>
The above code USES a macro called USB_camera to describe the camera, and the input parameter is the name of the camera.
Create a top-level XACro file that splicing together the robot and camera modules. The contents of the top-level file mrobot_with_camera.urdf.xacro are as follows, where the contents of the robot ontology description file mrobot_body.urdf.xacro can be found in the previous blog.
<?xml version="1.0"?>
<robot name="mrobot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find mrobot_description)/urdf/mrobot_body.urdf.xacro" />
<xacro:include filename="$(find mrobot_description)/urdf/camera.xacro" />
<xacro:property name="camera_offset_x" value="0.1" />
<xacro:property name="camera_offset_y" value="0" />
<xacro:property name="camera_offset_z" value="0.02" />
<!-- MRobot Robotics Platform-->
<mrobot_body/>
<!-- Camera -->
<joint name="camera_joint" type="fixed">
<origin xyz="${camera_offset_x} ${camera_offset_y} ${camera_offset_z}" rpy="0 0 0" />
<parent link="plate_2_link"/>
<child link="camera_link"/>
</joint>
<xacro:usb_camera prefix="camera"/>
</robot>
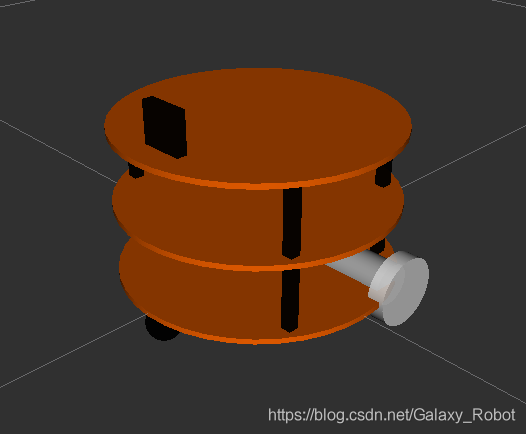
Display the model in RVIz, as shown in the figure below
roslaunch mrobot_description display_mrobot_with_camera_xacro.launch
Add it
Kinect is a commonly used RGB-D camera, and the XACro file is shown below
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="kinect_camera">
<xacro:macro name="kinect_camera" params="prefix:=camera">
<link name="${prefix}_link">
<origin xyz="0 0 0" rpy="0 0 0"/>
<visual>
<origin xyz="0 0 0" rpy="0 0 ${M_PI/2}"/>
<geometry>
<mesh filename="package://mrobot_description/meshes/kinect.dae" />
</geometry>
</visual>
<collision>
<geometry>
<box size="0.07 0.3 0.09"/>
</geometry>
</collision>
</link>
<joint name="${prefix}_optical_joint" type="fixed">
<origin xyz="0 0 0" rpy="-1.5708 0 -1.5708"/>
<parent link="${prefix}_link"/>
<child link="${prefix}_frame_optical"/>
</joint>
<link name="${prefix}_frame_optical"/>
</xacro:macro>
</robot>
You can import the mesh file of the model by setting the label in visualization. And then the Kinect and the robot were put together. The top-level Xacro file, mrobot_with_kinet.urdf.xacro, has the following contents
<?xml version="1.0"?>
<robot name="mrobot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find mrobot_description)/urdf/mrobot_body.urdf.xacro" />
<xacro:include filename="$(find mrobot_description)/urdf/kinect.xacro" />
<xacro:property name="kinect_offset_x" value="-0.06" />
<xacro:property name="kinect_offset_y" value="0" />
<xacro:property name="kinect_offset_z" value="0.035" />
<!-- MRobot Robotics Platform-->
<mrobot_body/>
<!-- Kinect -->
<joint name="kinect_frame_joint" type="fixed">
<origin xyz="${kinect_offset_x} ${kinect_offset_y} ${kinect_offset_z}" rpy="0 0 0" />
<parent link="plate_2_link"/>
<child link="camera_link"/>
</joint>
<xacro:kinect_camera prefix="camera"/>
</robot>
The results displayed in RVIz are shown below
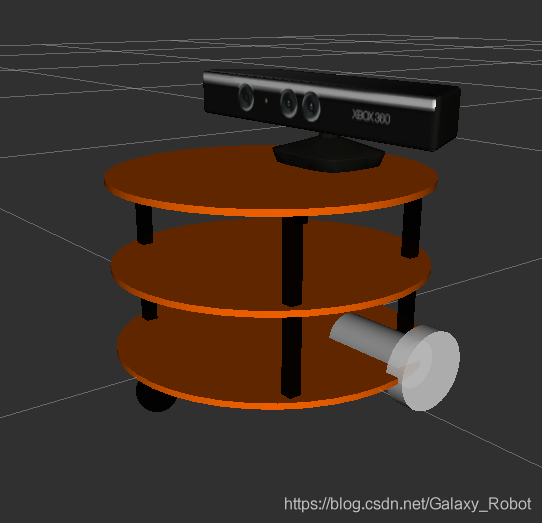
other sensors can be modeled in a similar way.