Follow the tutorial with moveit_ setup_ Assistant generates the configuration package, opens the terminal, runs roslaunch demo.launch, and reports an error
rlexception: error loading & lt; rosparam> tag:
file does not exist [3]
XML is < rosparam command=”load” file=”3″ ns=”manipulator”/> 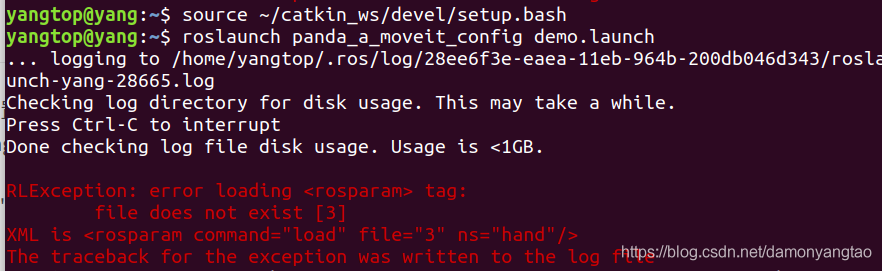
Then edit the model
In planning In the groups option, the kin.parameters file is empty, and the group default planner selects RRT

Save and regenerate the function package to overwrite the old function package.
Problem solving
reference resources: https://blog.csdn.net/anyingdaozhimi/article/details/109247029
Read More:
- After modifying the Tomcat configuration file in development, the modified configuration file will be automatically restored after ecplise starts Tomcat
- Pass parameters to the YML file, ansible playbook command
- Configuration error in mybatis configuration file
- Git command line configuration and configuration file to solve clone error libressl_ connect: SSL_ ERROR_ SYSCALL in connection to github. com:443
- OpenGL configuration file, as well as unable to parse the file solution
- Cannot read configuration file due to insufficient permissions
- @Value gets the configuration file value and returns null
- Specify the configuration file when the spring boot command starts
- About error statuslogger no log4j2 configuration file found
- ERROR StatusLogger No log4j2 configuration file found.
- VTK beginner 1, configuration of pro file
- ERROR StatusLogger No Log4j 2 configuration file found
- Error in mybatis configuration file namespace
- Python reads the configuration file. Ini and resolves the error
- Jenkins git configuration error status code 128 ‘text file busy’
- Solutions to errors reported by running pytest.ini configuration file
- VS 2010: An error occurred loading a configuration file: Failed to map the path ‘/’.
- Error configuration process and project file may be invalid appear in cmake compilation
- Forced shutdown of VMware wrokstation error (failed to get exclusive lock on the configuration file —)
- Caused by: java.sql.SQLException: Parameter index out of range (1 > number of parameters, which is 0